
3D列印如何讓機器人「感覺」世界
3D列印早已不只是製作玩具的工具,它正悄悄成為實驗室裡的「創新加速器」。傳統的模具製程難以製作微小又複雜的結構,而3D列印透過「加法式製造」能大幅提高物件的精細度,且大幅簡化流程、節省時間,使創意設計能快速實體化。最新研究更成功用3D列印打造出仿造人類皮膚的觸覺感測器,讓機器人擁有如人手般的觸感與判斷力,加強機器人的平衡能力。顯然,3D列印已經成為革命創新科技的重要推手!
撰文|黃鼎鈞
當我們想到3D印表機時,腦海中常浮現出列印玩具、公仔或手機殼等日常應用的畫面,然而,這項技術正迅速跨足實驗室,改變尖端科學研究的開發方式,由於3D列印具備的高自由度與快速製作模型的能力,使得許多原本難以實現的複雜設計,現在可以在短時間內完成原型並供研究人員進行測試,大幅縮短了研發的時間。
創新開發的加速器! 3D列印如何推動先進科技?
傳統材料製程如機械加工與光刻技術,雖然已是相當成熟的技術,但在面對尺寸微小、結構複雜或需要多材料組合的設計時,往往受限於製程精細度、製程速度以及昂貴開模成本。傳統的方法多屬於「減法式製造」,透過切削、蝕刻或去除材料來形塑所需結構,製作週期長且過程繁瑣,不利於快速反覆試錯與創新原型開發。相對來說,3D列印採取「加法式製造」的模式,透過逐層堆疊材料來製作模型,可以從設計圖直接輸出成品,更能製作高度客製化與結構複雜的裝置,省去傳統製程中的繁雜程序。不僅如此,現今已有多種列印材料可供選擇,例如導電高分子、陶瓷、生醫材料與複合奈米材料,使其成為材料與工程科學研究中極具潛力的實驗工具。以2025年發表於國際知名期刊《ACS Interfaces & Materials》的一項研究為例,科學家利用3D列印快速製作仿生感測器,模擬人類皮膚中的壓力感受器,進一步應用於機器人觸覺回饋系統。接著,讓我們來看看科學家是如何用3D列印來強化機器人吧!
用3D列印打造機器人的觸覺感測
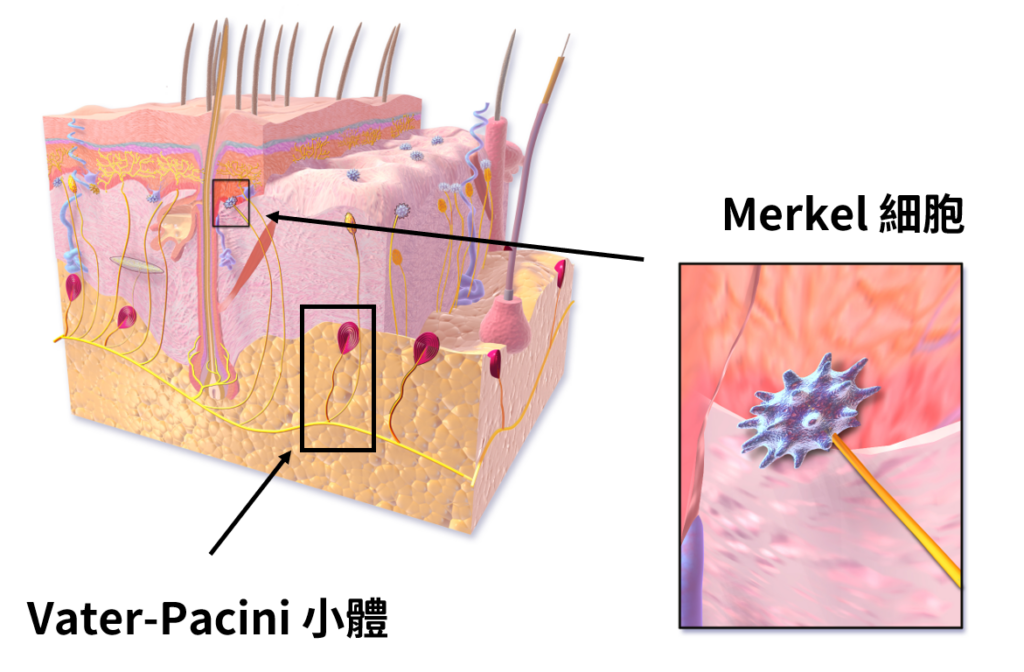
隨著科技的發展,機器人的研究如火如荼地展開,人們期待著機器人能帶給我們更便利的生活,甚至能完成困難又危險的任務,然而,目前的機器人對人類來說仍太「笨拙」。人類在觸摸物體時可以透過即時感知來調整動作,是因為皮膚提供了即時、多方向且靈敏的觸覺回饋,然而,機器人缺乏這樣的回饋機制,導致他們在走路、奔跑或抓取物體時,難以進行平衡調整,更無法處理精細的動作。為了讓機器人具備接近人類的觸覺能力,研究人員仿造皮膚中兩種感受器,包含負責靜態壓力感知的 Merkel 細胞與負責動態刺激偵測的 Vater-Pacini 小體,開發出一款3D結構的雙模態壓力感測器。這套系統結合了電容式與壓電式感測元件,能同時偵測垂直靜態壓力與多角度的剪切動態,就像皮膚中不同感受器分工合作,賦予機器人更接近人類的觸覺判斷能力。
在這項研究中,3D列印技術加速了整個研發的過程,透過電腦建模,研究團隊可以迅速設計出複雜的上下夾層感測結構來仿造人類的感測受器,研究團隊以數位光處理(Digital Light Processing,DLP)列印出精細的感應層,以及利用熔融沉積建模 (Fused Deposition Modeling,FDM)製作具有彈性的模具,透過兩種技術交互使用的列印,使團隊能快速改良設計、精準控制幾何形狀,大幅縮短研發流程,製作出可供測試並應用的感測器,加強了機器人運作時的精確度。

3D列印使科學家能快速實現所需的結構設計,無論是微米等級的感測元件,還是複雜的仿生結構,都能透過精準控制列印過程高效成形。其設計上的自由度,也讓研究人員能夠嘗試以往難以執行的幾何形狀與材料組合,推動功能性裝置的創新與開發。當3D列印不再只是單純的製造工具,而被視為實驗室中的創新加速器,它便能使更多原本停留在紙面或腦海中的創意概念,迅速化為可驗證的原型與研究成果,讓「從想法到實物」的路徑更加直接與靈活,進一步拓展人類對材料設計與科技創新的想像邊界。