
自駕車猜出你的下一步

撰文/黃柏瑋
SMPL模型
事實上,人類姿態預測的研究不在少數。有些模型利用主要關節位置表示目標的姿勢,並以2D圖形輸出預測結果,減輕不少影像表示的麻煩;然而這個看似合理的設計,其實犧牲了不少細節,侷限了模型應用的潛力。舉例來說,圖一中 (a)無法解釋目標的手心方向,雖說就目前的畫格而言似乎無傷大雅,但很可能影響接下來的猜測,做出完全截然不同的判斷。
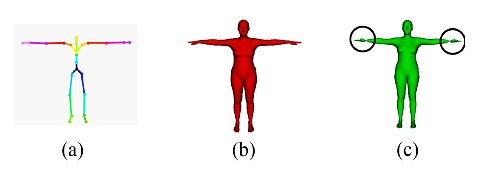
圖一、2D骨架與3D網格表示圖的差別(圖片來源:X. Du, et al, 2019.)
有些模型則需要將目標置中定位,因此無法負擔多人預測。而這樣的限制會影響機器的判斷,尤其在熙來攘往的十字路口上,眾人會同時移動,我們需要注意的,不是某個特定焦點,而是整體交通狀況。
bio-LSTM便是為了這個目的而誕生,除了採用擅長序列預測(sequence prediction)的長短期記憶網絡(Long short-term memory,LSTM),還搭載SMPL模型(Skinned Multi-Person Linear Model),藉由85個參數構成表面網格(mesh),將先前的2D推廣為3D資料,其中包含3個紀錄人物與偵測系統距離的變換參數(translation parameter)、72個表示關節位置和旋轉角度的姿勢參數(post parameter)以及10個代表人體輪廓的形狀參數(shape parameter)。
比起單純分析骨架關節位置,SMPL在還原人物方面考慮了更多細節,有效降低預測的失誤,而變換參數也改良了原先人物置中的缺陷,解決無法進行多人分析的窘境。
步態生物力學
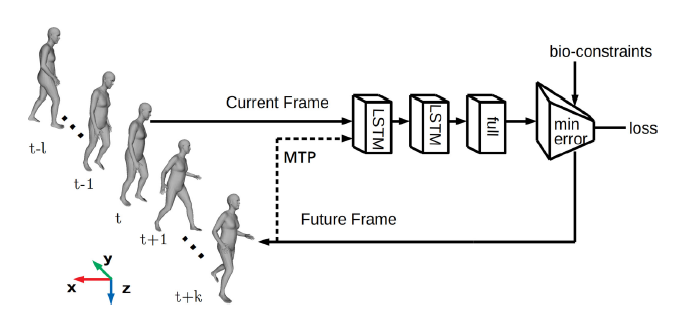
圖二、bio-LSTM的結構示意圖(圖片來源:X. Du, et al, 2019.)
bio-LSTM的結構(如圖二所示)除了以兩層式LSTM循環神經網路為主幹、SMPL參數來表示資料之外,還利用步態生物力學(gait biomechanics)來修正運動預測的不合理處。
首先,研究學者發現,人類在穩定行進時的步伐具有一定的規律,於是假設人腿會進行週期運動,其中相鄰畫格的腳速、方向和步長不會遽然大變,因此我們只需要推算畫格之間的差數即可(如圖三)也就是將預測的差數( d^)和訓練資料的事實(dt)進行比對,建立「週期損失函數」(Lc),符合人類的實際運動狀態。
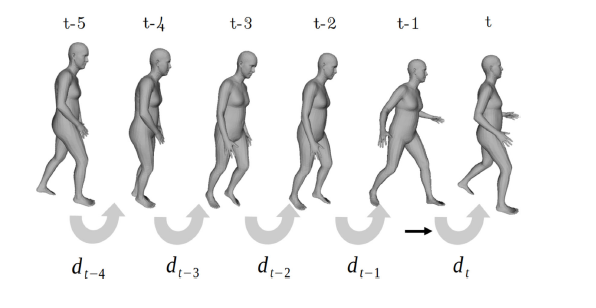
圖三、dt表示時間t和時間t-1的資料差值。(圖片來源:X. Du, et al, 2019.)
再者,人類在站立和行走時,身體應當呈現鏡像對稱(mirror symmetry),維持左腳和右腳與鉛直線的夾角相等(如圖四),肩膀與身體中線的夾角亦然。因此,我們定義「對稱損失函數」(Ls),將人類運動時的平衡感考慮在內。
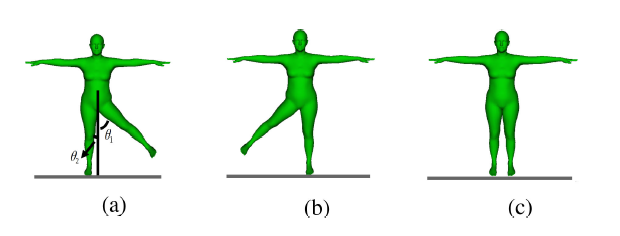
圖四、Θ_1和Θ_2分別為左腿和右腿與鉛直線的夾角,(c)為平衡穩定狀態。(圖片來源:X. Du, et al, 2019.)
最後,足夠的地面反作用力(Ground Reaction Force)是人類支撐自身身體十分重要的一環,而此力量主要由雙腳提供。導致人類在穩定行進時一定要與地面接觸,否則會踉蹌摔跤。於是我們需要定義「GRF損失函數」(Lg),討論腳底離地的體積(如圖五),考慮重力帶來的運動限制:
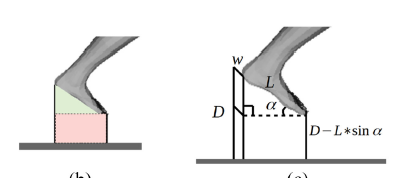
圖五,腳底板被簡化為平面,方便計算離地體積。(圖片來源:X. Du, et al, 2019.)
歸結以上三種生物力學因子,能預測人類穩定步行動作的目標函數即為:
兩個正規化參數(regularized parameter)λ1和λ2,分別根據迴路測試的結果定為10和0.01,調整不同因子對人體運動的影響權重。
bio-LSTM的前景
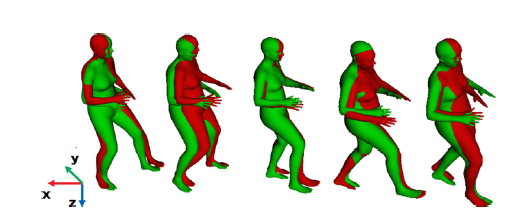
圖六、bio-LSTM的預測結果(綠人)與實際情形(紅人)的比較。(圖片來源:X. Du, et al, 2019.)
目前已可藉由過去五個畫格的表現,精確預測行人下一畫格的狀況(人類的步伐周期大約五至六個畫格),如圖六中預測結果(綠人)其實已與實際情形(紅人)相去無幾;除「一般步行」外,在「端著咖啡」、「扛揹重物」和「手機滑落」的情境下,也能有相當卓越的成績,可見bio-LSTM的學習潛力不容小覷。
但若想要一次預測數個畫格呢?這種預測稱為MTP(Multiple-Timestep Prediction),需要不斷將輸出餵回網路,成為新預測的參考資料(如圖二中的虛線),但也可能因此導致誤差越滾越大,波及預測的參考價值。然而,bio-LSTM的表現仍舊毫不遜色,和相對簡易的模型相比,結果明顯更貼近現實,合理還原人類穩定行進時的大致步態(如圖七)。
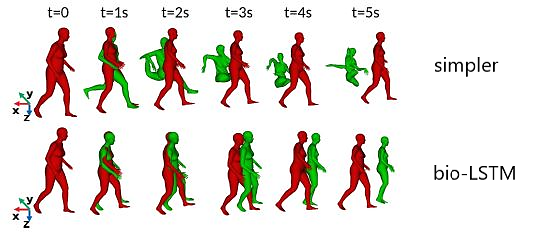
圖七、MTP預測結果。(圖片來源:X. Du, et al, 2019.)
雖然bio-LSTM目前仍停留在草創階段,而只能考慮個體行為。但或許在不遠的將來,我們真能夠打造出低事故發生率又兼顧車流順暢的完美「行人友善路口」。
參考資料
- X. Du , R. Vasudevan, and M. Johnson-Roberson, “Bio-LSTM: A Biomechanically Inspired Recurrent Neural Network for 3D Pedestrian Pose and Gait Prediction”, arXiv, 2019.
- Michigan IT News, “Teaching self-driving cars to predict pedestrian movement”, Michigan IT News, 2019.
(本文由教育部補助「AI報報─AI科普推廣計畫」執行團隊編譯)