
踩著球走的機器人(2/2)
撰文╱Ralph Hollis|譯者╱甘錫安
轉載自《科學人》2006年11月第57期
機器人起步走
以馬達控制球朝各種方向移動的方法有好幾種。我們在設計圓球機器人的驅動構造時,特別力求簡單。我們在桌上移動機械式滑鼠時,滑鼠底部的膠皮滾球轉動,帶動兩個正交的滾軸旋轉,滾軸旋轉的測量值提供資料給電腦,告訴電腦該如何在螢幕上移動滑鼠游標。圓球機器人的運作則正好倒過來,機器人的電腦發出命令,指揮一組馬達帶動滾軸旋轉圓球,讓機器人能在地上朝各方向移動。這種方式可說是「逆向滑鼠球」驅動。目前是以馬達控制球的俯仰和搖晃兩個方向,還有一個馬達(還沒裝上)負責控制身體轉向,讓圓球機器人能面對任何方向。
圓球機器人站在球形輪上,很像是馬戲團小丑貼在球上。這個球是空心球體,表面有一層厚厚的聚氨酯橡膠。這種驅動方式同時具備摩擦和減震兩種特性,因為球和滾軸之間一定會有滑動,所以必須補償回來。另外,球和身體之間有三個滾珠軸承,負責支撐身體重量。
為了計算出球的旋轉和行走距離,我們在每個驅動馬達上安裝了光學編碼器。每個編碼器有一個固定光源,對面有光線偵測器。透明的旋轉光罩(上面有很多不透明細條紋)固定在馬達之間的轉軸上。馬達轉動時光罩跟著旋轉,其上的條紋圖形交替遮斷光束及讓光束通過。圓球機器人的主電腦只要計算交替次數,就可以測出球的旋轉,進而得出行走距離。
控制圓球學問多
簡而言之,圓球機器人依據垂直方向,決定如何旋轉圓球,以便維持平衡及四處移動。幸好,圓球機器人基本上等於是個上下顛倒的單擺,物理學家對這種構造已經研究得很透徹了。我們運用最佳控制理論,決定驅動圓球機器人到達目標的方法或規則,同時盡量降低到達目標所需的工夫。決定規則時必須考慮圓球機器人的八種內部狀態,四種是機器人的前後動作,四種是左右動作。系統根據機器人內的感測器,針對這幾個方向測量或推定機器人的位置與速度、身體是否要傾斜,以及傾斜程度。
我們採用簡化的線性數學模型描述圓球機器人的動態。匈牙利裔美籍數學系統理論學家卡曼(Rudolf Kalman)於1960年發明的方法「線性二次式調節器」,可用來為這類系統推導控制規則。這種方法認為系統內部狀態的測量值與狀態值本身成比例。此外它假定狀態隨時間改變的比率,正比於狀態值加上控制動作(比如馬達轉矩)可能造成的比例影響。卡曼的技術巧妙地隨時間縮小積分函數,函數中包含狀態的二次測量值加上控制動作的二次測量值。這種解決方法會產生一組最終常數,這組常數乘上每一個內部狀態,可及時算出機器人在每一刻的建議(或最佳)控制動作。在圓球機器人的主電腦中,這些計算每秒會執行數百次。
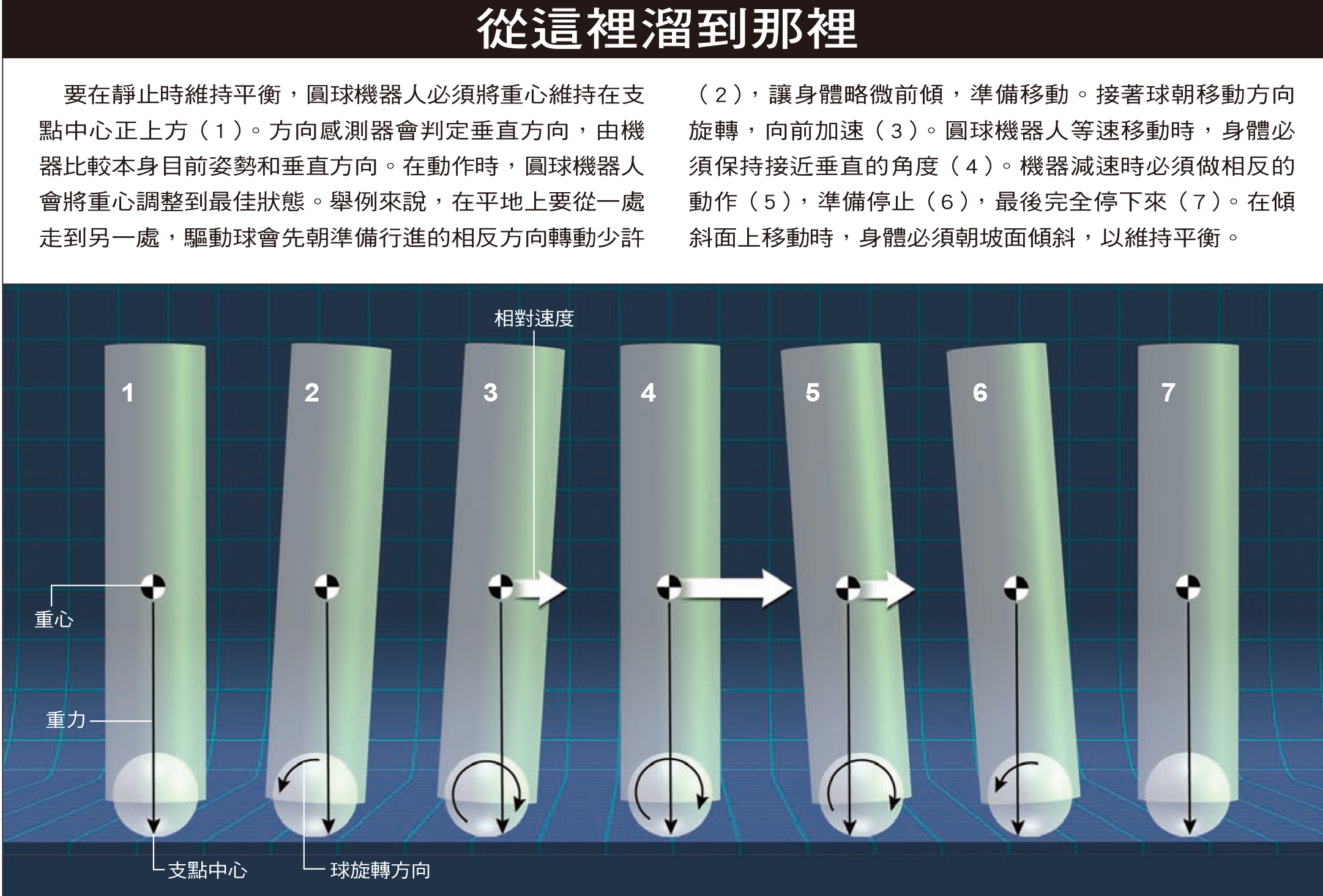
若機器人要站立著不動,它的控制規則會試圖將身體的位置與速度,以及每個方向的傾斜和斜率同時調整到零,並且會盡量減少要維持不倒所需的動作。當機器人要從一處走到另一處時,控制規則會自動下令圓球倒轉,使身體傾斜,讓機器人向前加速。接近它的目的地時,圓球會自動加速轉換傾斜角度,同時讓圓球機器人停止(見下圖)。
走進你家客廳
我們剛剛開始嘗試透過無線電與圓球機器人互動。我們計畫加裝一對手臂和能傾斜搖擺的頭,配備雙眼視覺系統和其他許多感測器,希望將這部機器發展成功能強大、擁有高度自主能力的機器人。我們的目標是了解這類機器人在日常環境中跟人類一起行動的表現如何,以及以量化方式比較它和傳統靜態穩定機器人在效果、安全及導覽能力的不同。我們認為,要在日常環境中運作,傳統機器人的發展演進遲早會到達極限。
投注心力開發動態穩定機器人的不只是我們,目前已有其他研究團隊製作出雙輪機器人,在俯仰方向為動態穩定,但在搖晃方向為靜態穩定。這些機器人雖然不像圓球機器人一樣是全向式設計,但也具備相當敏捷的行動能力,尤其是在戶外。長期看來,能具備人類外觀的動態穩定雙足機器人,可能有其優勢,特別是爬樓梯的能力。全世界的研究團隊都在努力開發這些複雜又往往十分昂貴的機器。在此同時,圓球機器人或許可以扮演有趣又有效的角色,用以研究行動機器人在人類空間該如何活潑且優雅地和人們互動。(完)
(本文由教育部補助「AI報報─AI科普推廣計畫」取得網路轉載授權)