
踩著球走的機器人(1/2)
撰文╱Ralph Hollis|譯者╱甘錫安
轉載自《科學人》2006年11月第57期
機器人該如何行動?
- 要在日常環境中和人類互動,聰明的行動機器人必須能夠直立,同時要能穩定優雅地移動。
- 目前的實驗性行動機器人為了保持平衡,大多設計成大輪距,但是這樣就難以在擁擠混亂的人類環境中自由移動。
- 身材瘦長、踩在球形滾輪上、可朝任何方向快速移動的圓球機器人,或許具備未來機器人所需的靈活移動能力,而可以在日常生活中協助人類。
聰明伶俐、能四處行走,在家裡、辦公室或看護機構幫我們處理日常活動的機器人,一直是每個人的夢想。這樣的機器人雖然是科幻作家和機器人研究者最愛的主題,卻似乎一直是個遙不可及的夢想。工程師還有很多根本的問題尚未解決,包括機器人的知覺、如何建立周遭環境的模型、自動推理、物品操作和行進方式等。
雖然跟理想之間還有很大的差距,但研究人員已經製作出很讓人驚訝的機器人了。2002年,在加拿大亞伯達艾德蒙頓市舉行的美國人工智慧協會年會上,有個團隊在會場入口處擺了具機器人。這部聰明的機器很快就找到了報到處、簽到參加研討會、接受演講室的分配、自行前往指定地點,最後在預定時間做了簡短的自我介紹。在其他例子中,有些機器人能勝任博物館的互動式導覽員,有些則具備家庭看護助理的功能,有些電腦專家和工程師也為行動系統加裝手臂和手掌,以便操作物品。這些實驗性機器人的行動裝置,都是底部有三或四個輪子的底座,讓機器人靜止時也能穩定站立,設計人員稱它為「靜態穩定」。
高度足以和人類互動的機器人,由於重心較高,所以加速和減速都得慢慢來,同時必須避開較陡的斜坡以免傾倒。為了克服這個問題,靜態穩定的機器人通常身體較寬,以便加大輪距來穩定重心,但如此一來,就會大大限制機器人穿越房門,以及在家具或人們之間穿梭的能力。
幾年前,為了克服必須加大輪距的問題,我決定以單一球形輪當成支撐腳和推進器,製作高高瘦瘦、動作敏捷的機器人。由於機器結構相當簡單,加上重心偏高,因此能朝任何方向快速移動。這套系統採用主動式平衡裝置,可達到所謂的「動態穩定」,也就是它必須不斷修正姿勢,才能維持站立狀態。我發現,以這種概念設計而成的輪式行動機器人,是至今還沒有人研究過的新類型。因為一時找不到更好的名稱,所以我叫它「圓球機器人」(ballbot)。
我和學生已經讓圓球機器人運作了一年多,同時研究其穩定性以及在人類環境中運作的適合程度。這段時間裡,許多來到實驗室的訪客都覺得它的平衡能力很神奇,而且單靠一個球形輪就能四處遊走,也相當厲害。
保持平衡不簡單
人類靠內耳前庭協助維持平衡:前庭的資訊加上視覺等其他感官提供的資訊,一起負責控制腿和腳的肌肉,讓我們能站直而不跌倒。圓球機器人維持平衡的方式也有點類似這樣。首先,機器人必須有個行為目標,例如要停留在一個地方不動,或是在兩定點之間直線行進。其次,機器人必須隨時知道重力的牽引方向,並且能測量身體相對於這個參考垂直線的方向。接下來,機器人的球形輪必須能夠朝任意方向旋轉,並測量自己在地面上的移動路線。最後,圓球機器人必須有辦法(或稱為「控制規則」)處理自己的感測器測量到的資料,發出指令控制球形輪轉動,達成前面所說的目標。
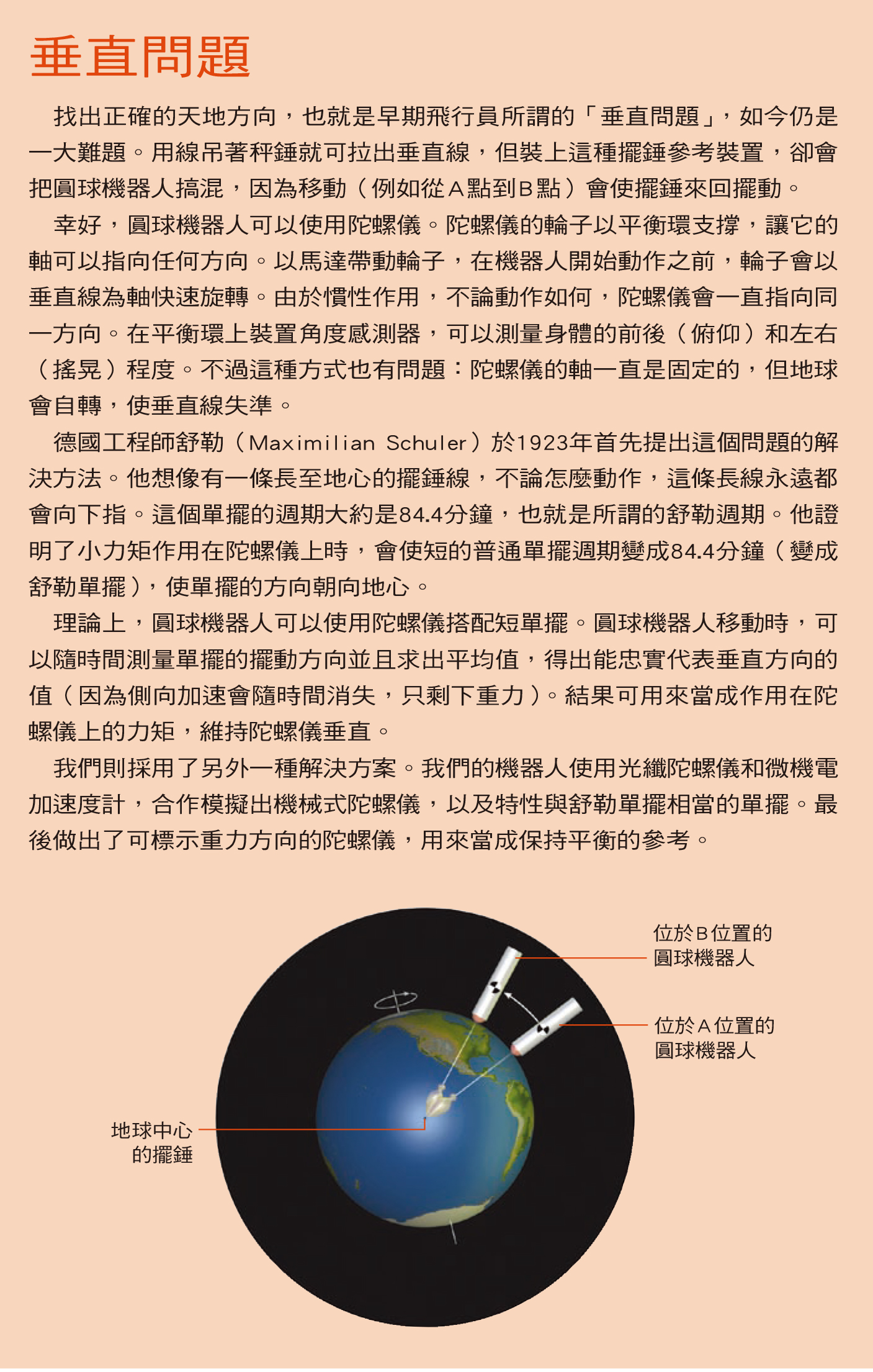 自古至今,解決「垂直問題」一直是極富挑戰性的課題(見右圖)。我們的解決方案大量利用了運算、光纖和微機電系統(MEMS)等領域的最新發展,讓我們能以低成本製造出功能與傳統旋轉式陀螺儀相仿的裝置。
自古至今,解決「垂直問題」一直是極富挑戰性的課題(見右圖)。我們的解決方案大量利用了運算、光纖和微機電系統(MEMS)等領域的最新發展,讓我們能以低成本製造出功能與傳統旋轉式陀螺儀相仿的裝置。
我們使用的系統中有三具正交(互成直角)的光纖陀螺儀,裝設於牢牢固定在圓球機器人身上的盒子裡(見下圖)。這幾具陀螺儀都沒有旋轉質量。每具陀螺儀配有光源、偵測器和一圈光纖。光波在光纖中朝相反方向行進,並且在偵測器上互相干涉。圓球機器人在運作時,三具陀螺儀的角運動感測器分別繞著三個方向的軸旋轉,但不論機器人怎麼行動,光纖內的光波都以固定速度行進。因此在每個感測器中,順時針與逆時針行進的兩個光波之間會有一小段路徑差。在不同狀況下,路徑差會使偵測器上的干涉條紋偏移,產生與角速度成正比的輸出,這是法國物理學家薩尼亞(Georges Sagnac)早在1913年就發現的現象。小型電腦會整合這三個角速度,計算出機器人身體俯仰(前後傾斜)、搖晃(左右傾斜)以及轉向(沿垂直軸旋轉)的角度。
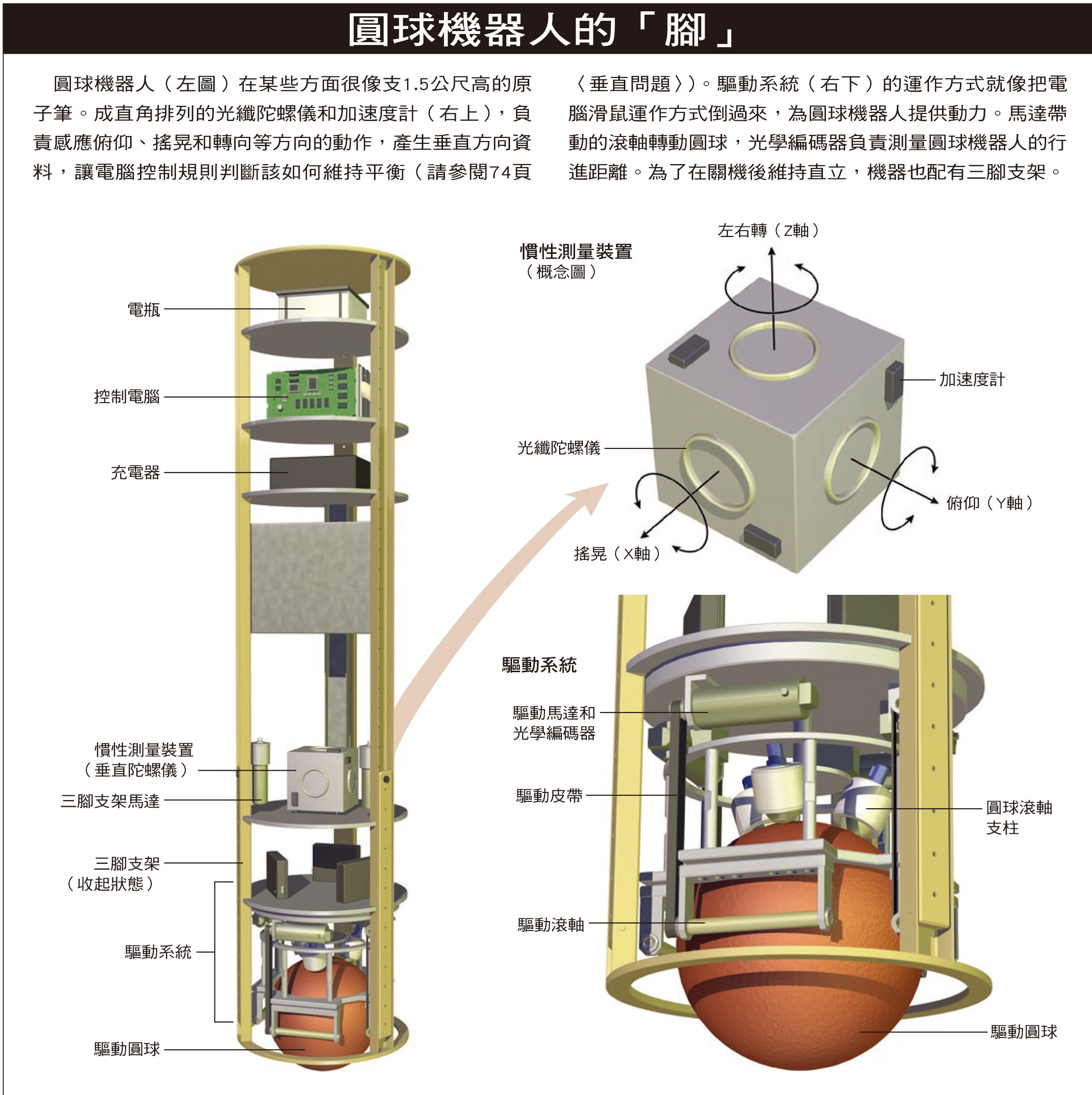
為回報正確的垂直方向,每個陀螺儀都必須計入地球的自轉。另外還有許多較小的效應,在一段時間之後可能造成誤差和漂移。我們的系統中有三具微機電加速度計,同樣成正交排列,跟陀螺儀安裝在一起。圓球機器人四處移動時,這些感測器會即時回報每個方向的加速度值,由電腦合併計算總加速度的方向和大小。這個數值是根據時間得到的平均值,因此加速度計的讀數無法直接用於控制平衡。這個結果是個可靠的長期指標,可為系統指示重力方向,用以校正光纖陀螺儀的漂移。(待續)
(本文由教育部補助「AI報報─AI科普推廣計畫」取得網路轉載授權)