
機器人的智慧分工

編譯/台大資工系 黃柏瑋
智慧型機器人
智慧型機器人有兩種典型的行為架構:階層式(hierarchical)與互動式(reactive)。前者是一種由上至下的順向(top-down)操作,且需要經過「深思熟慮」後方才動作。為了能夠在指定的場合下精準又迅速地完成任務,機器人必須先「感知」(Sense)周遭的環境,並且接受來自使用者的指令,接著利用人機互動介面或外部感測器(sensor)所蒐集的資料,擬定任務的實行計畫與相應的控制命令。經過「規劃」(Plan)階段,最終,硬體控制系統會依循計畫動作及路線採取「行動」(Act),完成階段性任務。

圖一、階層式行為架構
然而,階段式流程是建立在封閉世界(closed world)的假設上,也就是不存在機器人需要但不知道的事。而且「任務規劃」對運算能力的要求相當高,用以儲存「感知」訊息的資料庫又是全域的(global),需要隨時更新維護,使得即使一項簡單的任務也可能花上不少時間,犧牲效率與彈性。
相較於階層式,互動式沒了「規劃」,機器人直接將特定「感知」資訊與「行動」相連結,形成既定的「行為」(behaviour)模式。這個概念,類似動物的直覺反應,可以是先天的,例如:蛾類的趨光性;也可以由學習而來,例如:騎腳踏車的技能,一旦習得,當你跨上腳踏車便可不費吹灰之力地保持平衡、踩踏板,一氣呵成。當然,「行為」可以相互獨立,也可以多個同時發生,如唱跳、逃跑與尖叫、吃點心和看電影等。
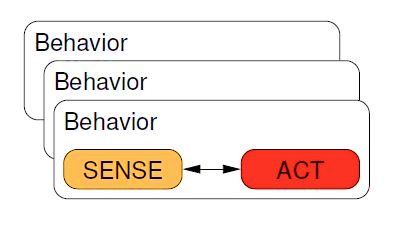
圖二、互動式行為架構
此外,互動式的「感知」資料庫是區域性的,可以節省整理資料庫的心力,讓反應更加及時。舉例來說,對於一個要閃避障礙物的機器人,障礙物與自己的相對位置比絕對位置更為實用,因為只有在附近的障礙物需要被納入考慮,運作上除了可以減少建立模型的的空間,也省去許多不必要的判斷和計算。
群體機器人
智慧型機器人固然強大,但有些任務實在不太可能單靠單一個體完成。當蜜蜂找到花蜜時,會利用「擺尾舞」通知夥伴,並提供蜜源與巢穴的距離;若有螞蟻死去,也會散發死亡費洛蒙,好讓夥伴們辨識並抬出巢外,保持巢內通道的乾淨暢通。分工合作的力量無窮,但如何合作無間,溝通絕對是關鍵之一。
比利時的研究人員因此設計了一項實驗,二十個高約13.5公分的雙輪機器人被要求在一六角型的區域內,按照規定順序走完三個停靠埠(booth)。由於機器人的觀察範圍有限,對彼此與環境的資訊並不全面(僅距離20至30公分內的機器人可以相互溝通),無法洞悉全局,因此必須靠著分工合作才能達到目標。
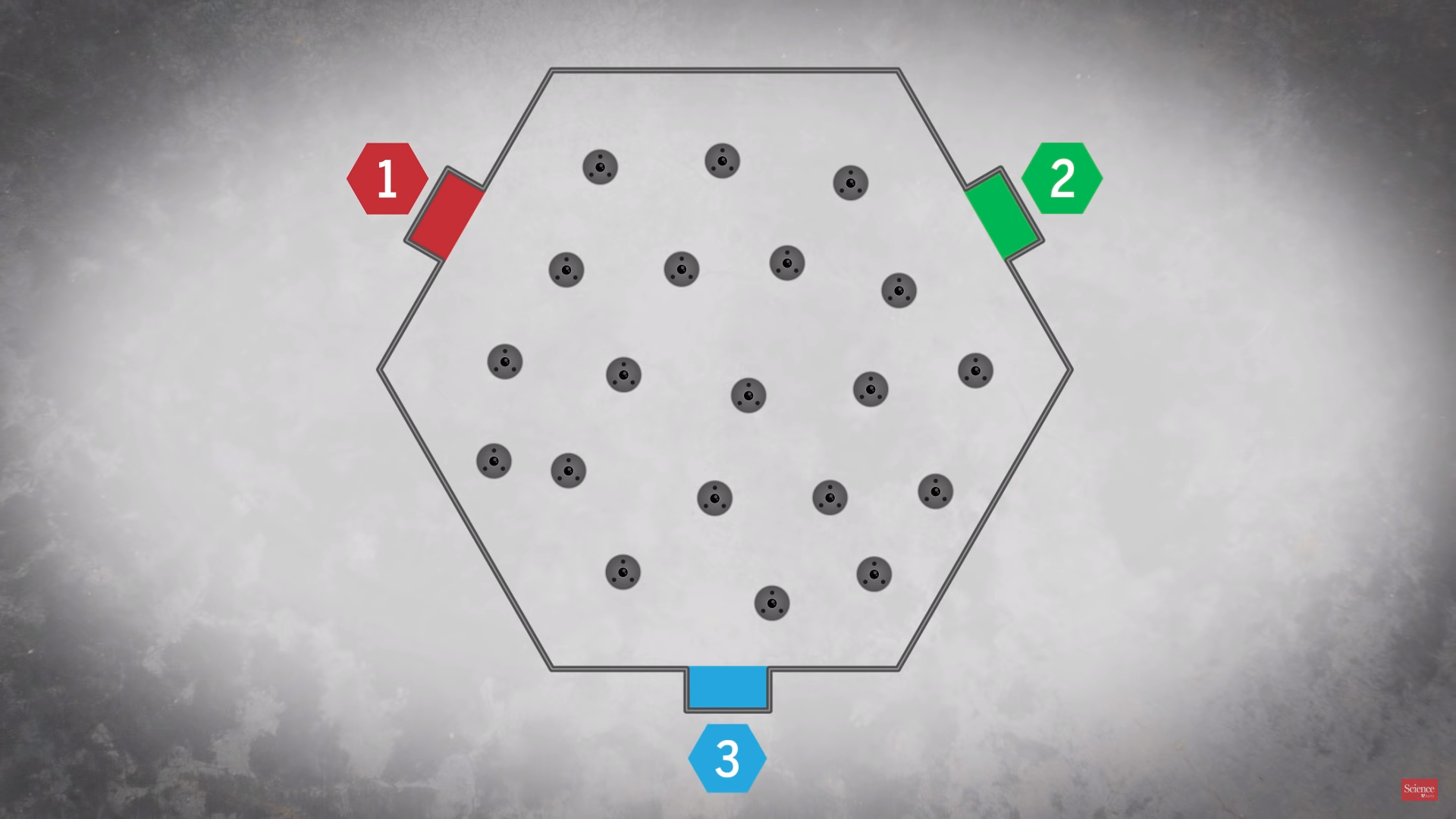
圖三、實驗中所使用的六角形場域與三個停靠埠(示意圖,來源:S. Sutton, 2018.)
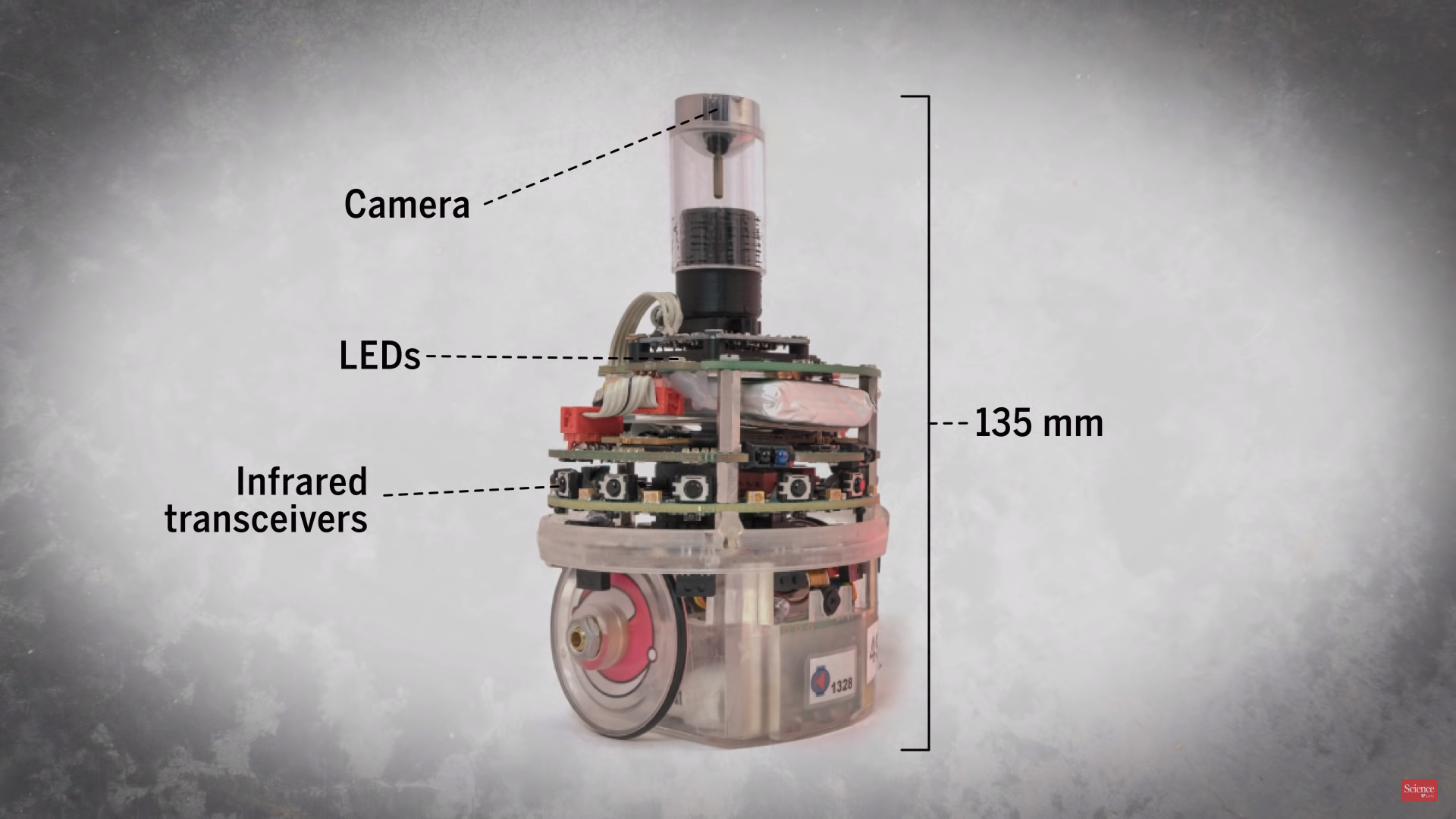
圖四、機器人的結構(來源:S. Sutton, 2018.)
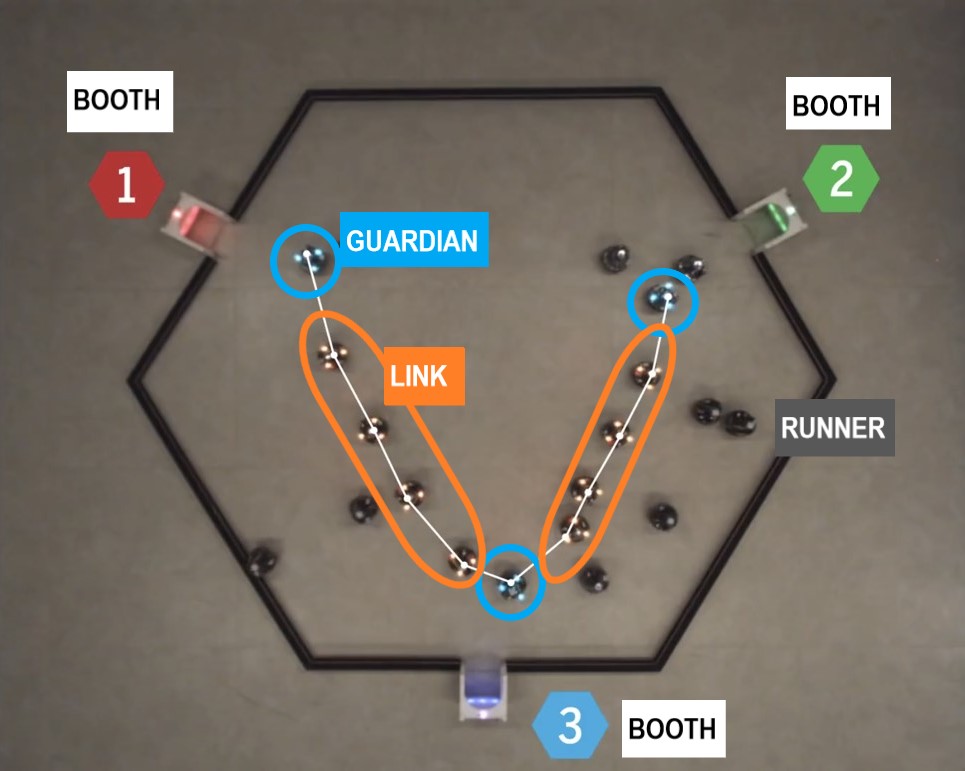
如同群體動物一樣,機器人各自扮演著不同的角色:跑者(Runner)、護衛(Guardian)、鏈結(Link)和鏈尾(Tail)。一開始,大家都擔任「跑者」,四處遊蕩,最先闖入停靠埠的就會轉變為該埠的「護衛」,避免亂了順序的機器人誤闖。接著,當三個埠都有各自的「護衛」守護後,其他機器人便轉換角色為「鏈結」,連接三埠「護衛」形成一條連結(chain);位處最尾端者,則為「鏈尾」,標示連結的形成進度。一旦接通三埠「護衛」,餘下仍為「跑者」的機器人便可循線按指定順序走完每個停靠埠,有系統且高效率地達成任務。

圖五、建造中的通路(來源:S. Sutton, 2018.)
圖六、建造完的通路(來源:S. Sutton, 2018.)
上述的合作模式推翻了大眾對機器人的傳統認知:機器人在特定環境中的運作,不一定需要預先計畫(pre-programme)。而在未來,我們可以善用這種新策略於搜救任務,就算缺乏明確的指示,機器人也有機會藉由相互溝通,摸索出正確或最有效率的工作順序。
編譯來源
S. Sutton, “Simple robots form a chain gang to solve complex problems”, Science/AAAS, 31 July 2018.
參考資料
R. Murphy, Introduction to AI robotics. MIT Press, 2000, pp. 105-152.
(本文由教育部補助「AI報報─AI科普推廣計畫」執行團隊編譯)