
機器人重現漫步中的古生物
編譯/葉姝涵
反向工程
德國洪堡大學(Humboldt University)的研究人員則試圖綜合以上兩種方法,截長補短。
他們首先利用O. pabsti的電腦斷層資料建立數位三維骨骼模型,進行「運動力學模擬」(kinematic simulation),以確定四肢關節的可活動角度與範圍;而後的「動態模擬」(dynamic simulation)則再加入如重力、摩擦力與平衡等可能影響生物運動的因子。同時,他們也參酌其他四足爬行動物的運動方式,將現存如蠑螈(salamanders)、石龍子(skinks)、鬃蜥(iguanas)與凱門鱷(caimans)等近似物種的運動模式納入考量。
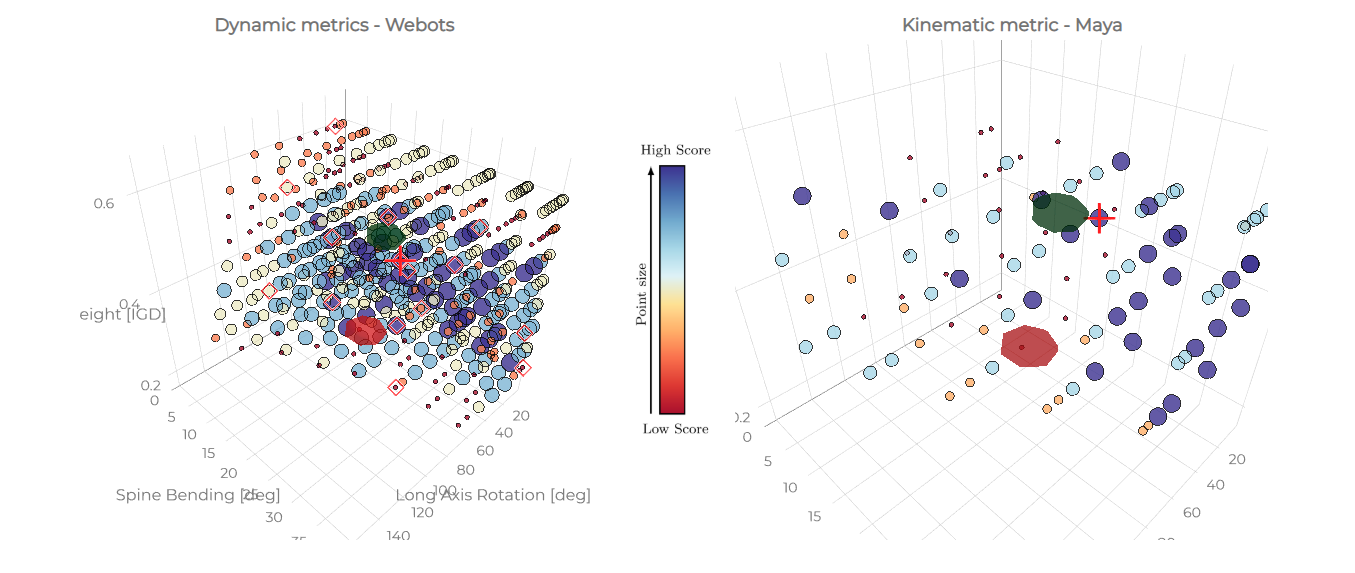
圖一、研究中所使用的電腦模擬程式。採互動式介面,讀者可自行調整參數,直接觀察O. pabsti運動姿態的改變。右側為運動力學模擬的參數;左側為動態模擬參數。(來源:OroBOT project)
重現物種運動方式的演化
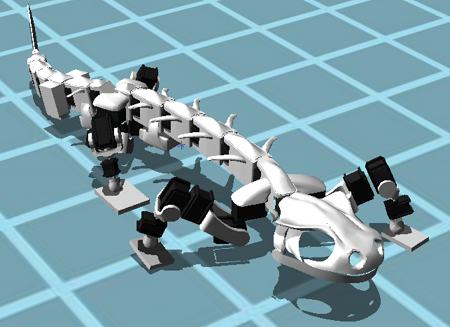
最後,研究團隊依據這些模擬數據創造了名為「OroBOT」 的四足機器人,來實際演示O. pabsti當時在地表爬行的姿態。最終依據能量消耗、平衡以及與足跡化石的一致性等面向逐一篩選,由512 種可能的運動類型中,推估:O. pabsti運動時,腹部遠離地面,少有如蠑螈的側向動作,步伐也相對穩定。是屬於晚期四足類生物較進階的運動方式,能減少所需消耗的能量。
這項研究的創新之處,在於考古學家可以結合舊有的研究策略,由化石、電腦模擬到實體機器人,盡可能地忠實重現古生物的運動方式。除了早期完全陸生生物O. pabsti外,同樣的方法也可用於釐清其他生物運動方式的演化,如鳥類主動飛行的能力、人類的雙足運動,或海洋哺乳動物由陸地回歸海洋的過程。對於考古生物學家而言,無疑是一項令人振奮的創新。
編譯來源
C. Gramling, “A four-legged robots hints at how ancient tetrapods walked“, Science News, 2019.
參考資料
J.A. Nyakatura, K. Melo, T. Horvat, K. Karakasiliotis, V.R. Allen, A. Andikfar, E. Andrada, P. Arnold, J. Lauströer, J.R. Hutchinson, M.S. Fischer & A.J. Ijspeert, “Reverse-engineering the locomotion of a stem amniote“, Nature 565, 351–355, 2019.
(本文由教育部補助「AI報報─AI科普推廣計畫」執行團隊編譯)