
【材料科技】奈米、馬達、印刷術
■要說起台灣響叮噹的大公司,我想台灣積體電路(台積電),一定在你的名單之內。或許你不斷聽到晶圓代工、晶圓代工,到底晶圓代工是什麼呢?這又怎麼跟「奈米、馬達或印刷術」扯上邊呢?

撰文|方程毅
加州大學聖地牙哥分校(University of California, San Diego)奈米工程學系(NanoEngineering)的系主任 Joseph Wang教授率領的研究團隊最近研發出一種新穎方法在矽晶圓表面上刻畫出線條或圖案:讓奈米馬達在矽晶圓表面上遊走。「凡走過必留下痕跡」這些痕跡就成為矽晶圓表面上的線條或圖案。那麼為什麼要在矽晶圓表面上留下線條或圖案呢?這就牽扯到標題中所謂的「印刷術」。我們所謂的積體電路,就是把複雜的電路通通聚集的小小的面積內,而「矽」便是這個電路的平台。要把電路放到矽晶圓上當然不是像插麵包版一般,把電線黏到矽晶圓上,而是直接在矽晶圓上刻劃我們想要的形狀,再視情況所需,利用各種蝕刻(etching)、鍍膜(coating)或是參雜(doping)等等各種半導體製程的技術製造出我們想要的電路。因此最重要的一步就是一開始在矽晶圓上刻畫圖案,這個步驟便叫做lithography,中文翻譯便是平板印刷術,半導體製程上又叫作微影技術,亦即將微小影像刻畫在矽晶圓上,因此在介紹Joseph Wang教授的研究前,先給各位讀者一些關於微影技術的背景知識。
目前世界上最主流的方法便是利用光學微影(photolithography)在矽晶圓表面刻畫圖案。光學微影的流程如圖一,圖一(a)是整個流程的基本架構,其中的光阻(photoreisit)是光學微影中不可或缺的一種高分子。當光阻受到光照時高分子的結構會發生變化,依照光阻的性質分為正光阻及負光阻。而在光阻之上為光罩,光罩上有我們希望「印刷」或「微影」到矽晶圓上的圖案。因此當我們從上方入射光的時候(圖一(b)),光阻便會產生化學變化,照光之後再用另一種溶液(顯影液)沖洗光阻,便會重現光罩上的圖形,這個步驟稱為顯影(圖一(c))。正光阻的性質是便是照光之後光阻可以被顯影液洗掉,而未照光處則會留在原處(c-1);負光阻便剛好相反,未照光處會被顯影液洗掉,而照光處則會保留(c-2)。接著再將這些表面帶有光阻的矽晶片送去蝕刻(圖一(d)),而表面有光阻的區域就會被保護不被蝕刻,未受光阻保護的矽便會被蝕刻,蝕刻完之後再將表面光阻移除(圖一(e)),我們便成功將光罩上的圖形「刻畫」或「微影」到矽晶圓的表面啦。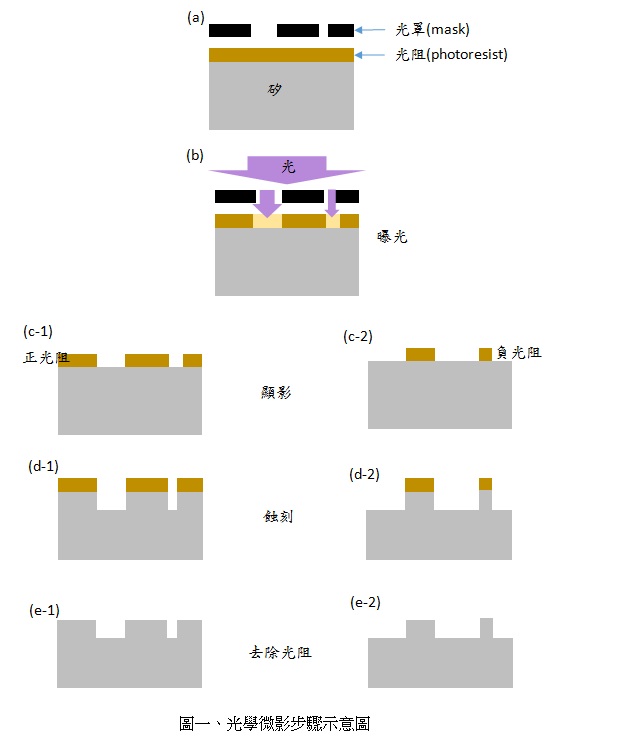
但是我們知道積體電路就是要越小越好,而光學微影並不能說做多小就做多小,由於光經過狹縫會繞射,造成到達光阻時的圖形大小比原本光罩上定義的圖形大,而這個繞射極限也是科學家一直不斷想解決的問題,通常來說光的波長越短,能微影的極限越小。而光罩本身的製作也相當的昂貴,因此一旦光罩製造出來後,想要再調整圖案或形狀便須重新製作光罩。因此或許你會想,那我能不能像畫畫一般,用筆直接寫出我想要的圖案呢?
Joseph Wang教授率領的研究團隊便提出了一個相當有創意的解決辦法。他們將一個奈米馬達(nanomotors)或奈米機器人(nanorobots)埋在光阻中,這個奈米馬達本身是磁性材料,因此可以利用外加磁場控制這個奈米馬達的運動軌跡,因此在照光的同時移動奈米馬達就好像在光阻表面畫畫一樣,可以刻畫出我們想要的圖案。這項研究使用的奈米馬達有兩種形狀,第一種為圖二(a)中棒狀馬達,其材料由金(Au)、鉑(Pt)及鎳(Ni)構成,其中鎳為磁性材料,因此可以利用外加磁場控制其運動軌跡,直徑從200奈米到1000奈米,而在光阻中移動的速率可達每秒15微米(μm/s),此種棒狀的馬達是"擋"光型的馬達,也就是被光擋住的地方就是圖形被定義的地方;而第二種馬達為透明球狀馬達圖二(b),這種透明球狀馬達有聚光的功能,因為聚光所以光在球正下方的強度最強,也就是說這是一種穿透型的聚光馬達。(讀者不妨也可以想想看這兩種馬達哪一個要用正光阻哪一個要用負光阻呢?)球狀馬達的直徑在這裡為2.16微米,材料主要為透明的二氧化矽或是聚苯乙烯,光因為球聚焦後的位置就是圖案被定義的位置。Joseph Wang教授率領的研究團隊成功利用這種方法寫出線條與圖案,這樣研究成果也被發表在2014年《自然‧通訊》期刊中(Nature Communications),並獲得知名網站Nanowerk的報導。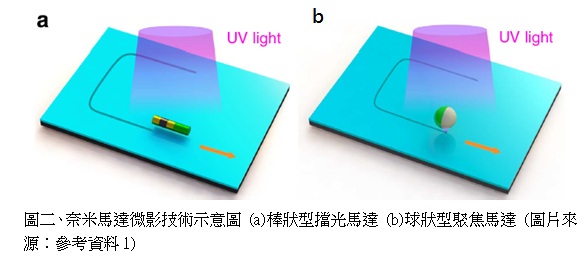
Joseph Wang教授在受訪時表示:「我們這種奈米馬達的微影技術能夠控制其運動軌跡並且利用獨特的擋光及聚光技巧直接在光阻上寫出圖案,這也開啟了未來製造出具有獨特形狀及大小的圖案可能性。」而這項研究是利用磁場來控制奈米馬達的運動,Joseph Wang教授也提出未來可以有更多方法來控制奈米馬達的運動,包括熱、機械力、表面電漿(plasmonic)或是化學反應等等。當然目前他們所展示的圖樣都還是以簡單的線條為主,且線條的寬度尚不足以小到跟目前主流的微影技術競爭,因此還必須投入更多的資源開發這項技術,Joseph Wang教授也希望將來可以做出更複雜的圖形並有更多應用。
參考資料:
1.Jinxing Li, Wei Gao, Renfeng Dong, Allen Pei, SirilakSattayasamitsathit and Joseph Wang, “Nanomotor lithography,” Nat. Commun., 5,5026 (2014).
2. http://www.nanowerk.com/spotlight/spotid=37884.php
--
作者:方程毅 科教中心特約寫手,從事科普文章寫作。