
自駕車緩解塞車窘境

編譯/台大資工所 許晉華
道路交通模擬
研究採用一套名為SUMO(Simulation of Urban MObility)的平台來模擬道路交通。該平台有著與電玩遊戲相似的介面,使用者可自由設定如道路形式、交通管制燈號與車流量等背景參數。研究團隊的主要構想,是希望藉由增加車潮中自駕車的比例,以緩衝、調整人類駕駛的錯誤駕駛行為,提升整體交通效率。模擬考慮了多種道路情境,包括單一圓環、雙圓環、8字形道路、十字路口、多條車道匯集的瓶頸路段,甚至紐約曼哈頓市區的方格狀街區設計。
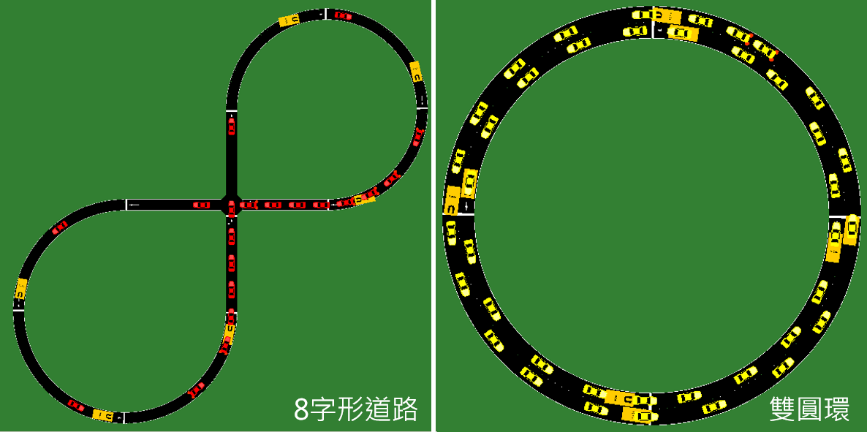
圖一、道路模擬情境:8字形與圓環 (來源:Flow Project)
所有加入車流的自駕車,都由一個基於強化學習(reinforcement learning)架構所訓練出的「中央演算法」所控制,調整自駕車加速與剎車頻率;唯獨在曼哈頓方格街區的模擬情境中,由於交叉路口密集,改由讓中央演算法控制交通號誌來影響車流。
自駕車提升整體車速
實驗結果相當亮眼:在8字形道路、共14台人駕車行駛的情境下,替換其中一台為自駕車後,整體車速提升至兩倍;在瓶頸路段模擬中,10%的人駕車替換為自駕車後,交通狀況獲得改善,甚至在某些時段,平均車速也提升達兩倍以上;在曼哈頓街區的模擬中,由AI代管交通號誌的情況下,道路可運輸車量增加了7%。然而,實際上,其中的訣竅相當簡單:保持自駕車車速、保持與前方車輛的安全距離,以及減少剎車次數與頻率。
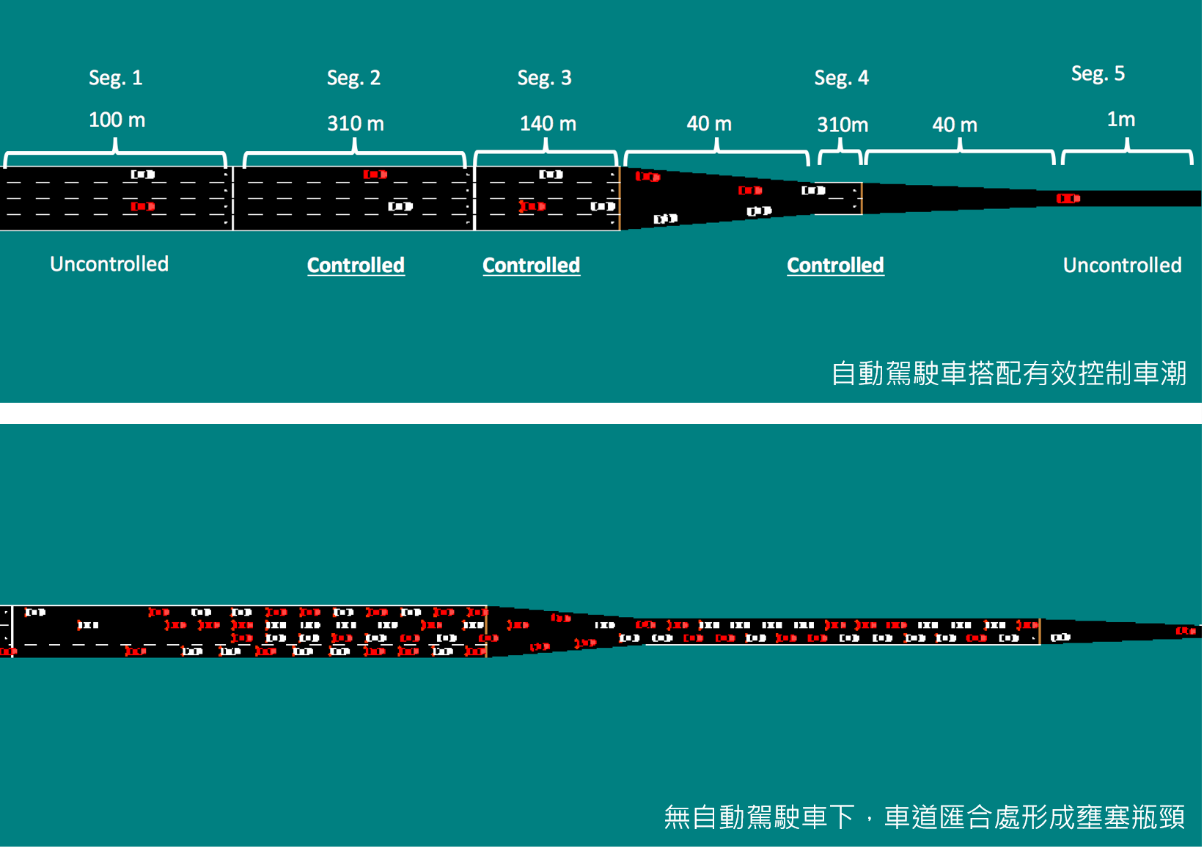
圖二、瓶頸路段的模擬:無自駕車(上)、有自駕車加入的情境(下)。(來源:Flow Project)
立即行動
當然,該研究的主導人Eugene Vinitsky不諱言這樣的演算法尚有改善空間,因此選擇公開原始程式碼,歡迎大家參考、使用,在既有的框架下集思廣益,開發出更好、更完美的版本,有朝一日,將自駕車與AI實際應用於交通路況的監控。
而在此之前,其實已有許多既有的技術與配備,只有稍作修改,便可有效改善交通狀況。舉例來說,現有多數市售汽車皆具的主動車距調節巡航系統(Adaptive cruise control,ACC)就是其中之一。AI所採用的交管策略看似簡單:維持一定車速、與前方車輛保持安全距離並減少非必要的剎車,但要讓所有駕駛都遵守卻相當困難。ACC可以根據上述原則自動調整剎車次數、加速模式、車距與車速等,來緩解塞車現象,節省時間、燃料,甚至挽救一些無辜的生命。這是我們當下可以立即採取的行動。
編譯來源
M. Hutson, “Watch just a few self-driving cars stop traffic jams”, Science/AAAS, 16 Nov 2018.
參考資料
Alexandre Bayen’s Mobile Sensing Lab, “Flow: a deep reinforcement learning framework for mixed autonomy traffic”, Flow.
(本文由教育部補助「AI報報─AI科普推廣計畫」執行團隊編譯)