
人模人樣的機器人(1/2)
撰文/Duncan Graham-Rowe│譯者/王怡文
轉載自《BBC知識》2014年6月第34期
不過十幾年前,機器人為了站立,還得曲著膝蓋,猶如便祕一般,如今拜仿生知識與科技之賜,它們已經能夠邊活動邊調整姿勢。但機器人學家不以此為滿足,他們希望機器人不只為我們代勞,像我們一樣思考,最好還能察言觀色,知道行為怎麼拿捏。
2013年12月在美國佛羅里達州霍姆斯特德高速公路上的人,都難免以為自己闖進了George Lucas的科幻片場景裡。路上擠滿洶湧的人潮,觀看著宛如來自未來的機器人應付一連串挑戰,一旁,還有配備一大堆攝影機的工作人員錄下它們的一舉一動。
這些機器人都想從美國國防高等研究計畫署(DARPA)機器人挑戰賽預賽脫穎而出。參加者包括美國NASA、麻省理工學院之類聲名卓著的機構,這些團隊挑戰一連串特別設計來測試機器人能耐的任務,包括爬樓梯、把水管接上消防栓並打開水閥、開車、使用工具擊穿水泥牆,以及永遠的經典:開門進入建築物。
DARPA挑戰賽的任務對人來說或許沒什麼,對機器人與它們的設計者卻是大挑戰。這些任務秉持的理念是,我們或許能派機器人代替人類從事出生入死的任務,或讓家用機器人為我們代勞許多事情,像是接聽電話、熨燙衣服,或者開車去商店。這就是為何DARPA舉辦這個挑戰賽,懸賞兩百萬美元要2014年決賽再次碰頭的八組入圍者互相廝殺。這也是為什麼Google等改變市場遊戲規則的科技公司,現在也來湊一腳。Google去年收購了波士頓動力公司(Boston Dynamics),這家總部位於美國麻州的新創公司已開發出一些相當精巧的機器人,包括大狗(BigDog)和Atlas。
DARPA挑戰賽裡出現的大部分機器人,都不是老掉牙的「有輪子的垃圾筒」那種,而是「人模人樣」。它們用雙腳站立,有肩關節、手臂,甚至還有像人的靈巧雙手。促成這波變革的是機器人學家的這項體認:我們的世界是圍繞著人形設計的,因此需要能適應這種環境的機器人。與其重新設計整個世界來迎合圓胖、短小、裝著輪子、只有電腦科學碩博士才叫得動的機器人,不如索性讓所有機器人更像人類,使它們的動作、互動方式甚至思考都像我們。
機器人怎麼動
機器人終於開始學會我們視為當然的一件事:使用雙腳。
想知道雙腳比輪子優越在哪,只要看看Roomba掃地機器人負責清掃的家裡,樓梯積了多少灰塵就知道。事實上,我們的世界充滿各種不平坦、曲折、柔軟甚至會動的表面,這對陽春的輪子來說是一大挑戰。
「雙腳很好用,因為它們能在不規則的地形行動自如。」波士頓動力公司創辦人Marc Raibert說。「人們和動物用腳幾乎能到地球上的各個角落,而靠輪子和履帶的機械只能在比較光滑平坦的表面移動,例如道路。」
事實上,就算是特別設計來應付崎嶇地形的輪子機器人也會「進退不得」,例如2009年,NASA的精神號火星探測車便很丟臉地困在火星上的沙坑裡,而且據我們所知,到現在還沒脫困。
這也難怪長久以來機器人學家便一直嘗試讓機器人能像我們那樣行走。他們成功的程度不一。雖然已經做出一些非常敏捷的六腳機器昆蟲、四腳機器哺乳動物等,但是事實證明,要雙腳直立困難多了。簡單的原因是:只要超過兩隻腳,即使沒有動力也可能保持穩定。早期的雙腳機器人直立時,不費吹灰之力就能推倒它,更別說要它們在不平坦的地面上行走了。
步履踉蹌的研發歷程

Honda的Asimo是機器人界的風雲人物,它奔跑的時速可達6公里。(圖片來源:Honda)
正因為Honda與Sony等厲害的科技公司知道這問題有多困難,十年前他們接下這項挑戰,研發Asimo和QRIO等雙腳機器人。業者投入數百萬美元研發這些業餘機器人,是想藉由達成有效「解決」雙腳運動問題這神聖的里程碑,展現他們的技術。
他們某種程度上成功了。這些機器人能上下樓梯、穿越不平坦的地面、跑步、跳舞,甚至打幾招太極。成果令人印象深刻,只是伴隨著一些缺陷。這些機器人基本上是設計成隨時保持穩定,也就是說,任何時候你下令暫停,理論上它們都該保持站立。於是Asimo和QRIO為了保持降低重心,都設計成屈膝半蹲走路,看起來簡直像便祕。
但最近,更偏向生物學的做法已帶來全新啟發。研究團隊及波士頓動力等公司,在模仿生物運動動態方面確實已有了進步。例如人類就連在站立時,姿勢也很少真正處於穩定的垂直,而是幾乎不斷調整來維持直立。我們走路或跑步時,幾乎一直處於往前倒再穩住的狀態,如此不斷前進。機器人裝設許多感應器後,就能即時做必要的修正及調整,達到部分效果。但波士頓動力還經由密切觀察其他生物的動態,發現其他好處。2012年,該公司的四腳機器獵豹不辱其名,刷新有腳機器動物的世界紀錄,跑出時速四十五公里,打破1989年的時速二十一公里紀錄。這項成就歸功於和專家合作找出獵豹得以高速奔跑的特徵,當中最值得一提的,是獵豹的脊椎是可彎曲的,這使得牠們不必把腿跨得更大步,就能增加步幅。
ATLAS起步走
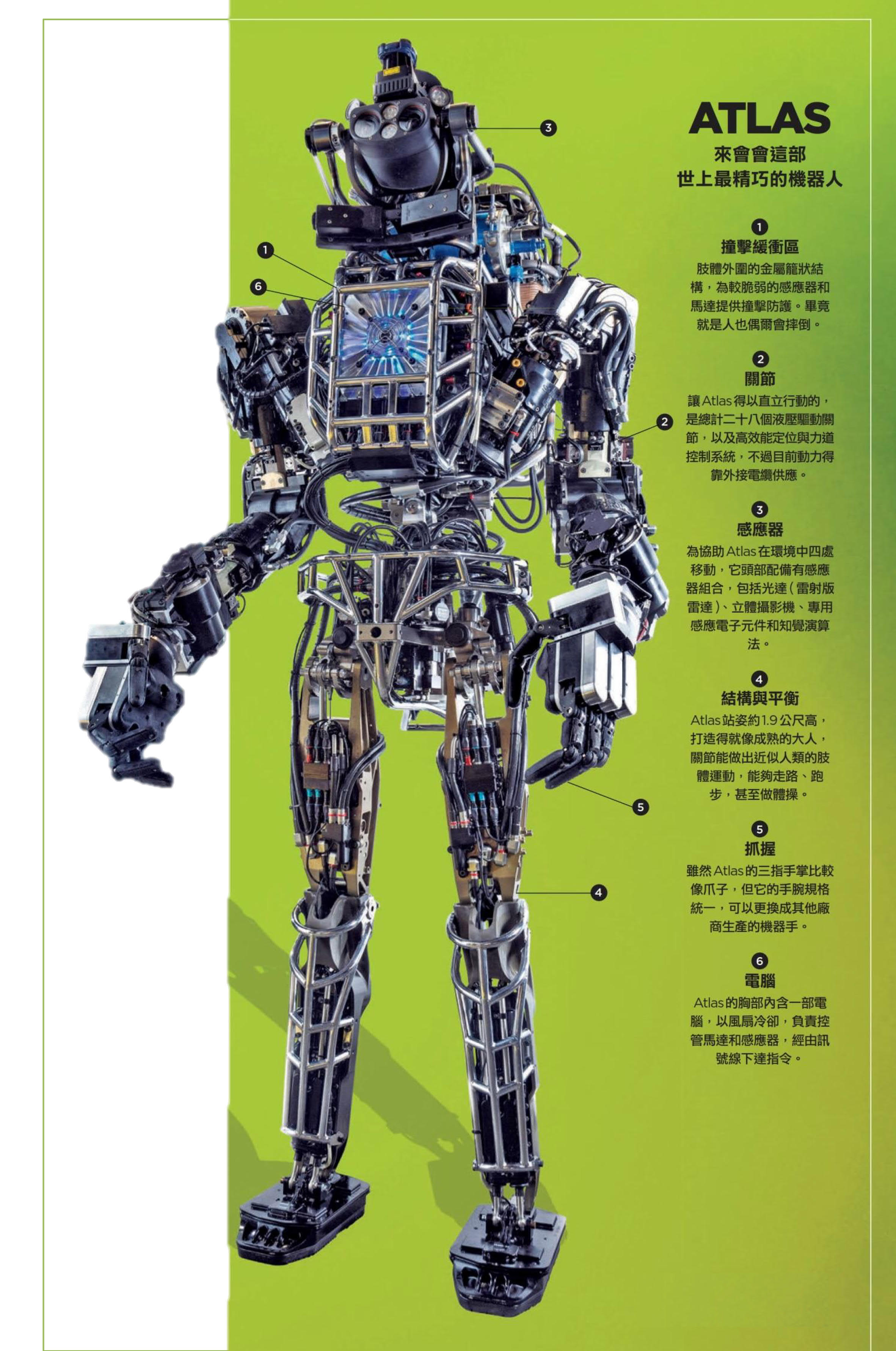
波士頓動力能研發出Atlas,也是將類似領悟套用到雙腳系統:這部雙腳機器人會做多種類似人類的動作,包括走過不平的地面,以及表演許多體操般的動作。
這跟稍早提及的機器人不是很像嗎?不,Atlas和Asimo、QRIO之輩的不同之處在於,它不必預先「知道」所處環境、先把動作編排好,而能夠在動作時搭配立體攝影機和光達(LIDAR,用雷射掃描的雷達)來感應周遭環境。此外它的動作會不斷調整,能針對環境改變做出反應。由於它是不斷假設自己失去平衡並據此調整致動器,因此能像人類一樣,即使行進中受到撞擊,也能補救、重新站直。
這無疑是機器人演化史上的重大成就,或許等級相當於早期人類從四腳站立起來變兩腳那一刻。但Raibert對他的成就很謙虛。「我沒有區分四腳和雙腳,」他說,「幾乎所有問題本質上都一樣,幾乎所有解法本質上也都一樣,至少真正有效的解法是如此。」
雷伯特說,一切只須結合運算、感應、精巧的機械系統,以及了解該問題的物理特性。不過他緊接著指出:「Atlas能夠在特定狀況下行走,並且有許多值得期待的表現。但如果把它的能力和真人相比,還是有很大的改進空間。」
Atlas令NASA驚豔到買了一部來改裝,好參加DARPA挑戰賽。他們用光鮮亮麗的白色保護外殼包住Atlas外露的骨架,並將它命名為「女武神」(Valkyrie)。只是女武神沒能在賽事中表現亮眼,最後落居倒數第二名,令NASA有點沒面子。
動手動腳
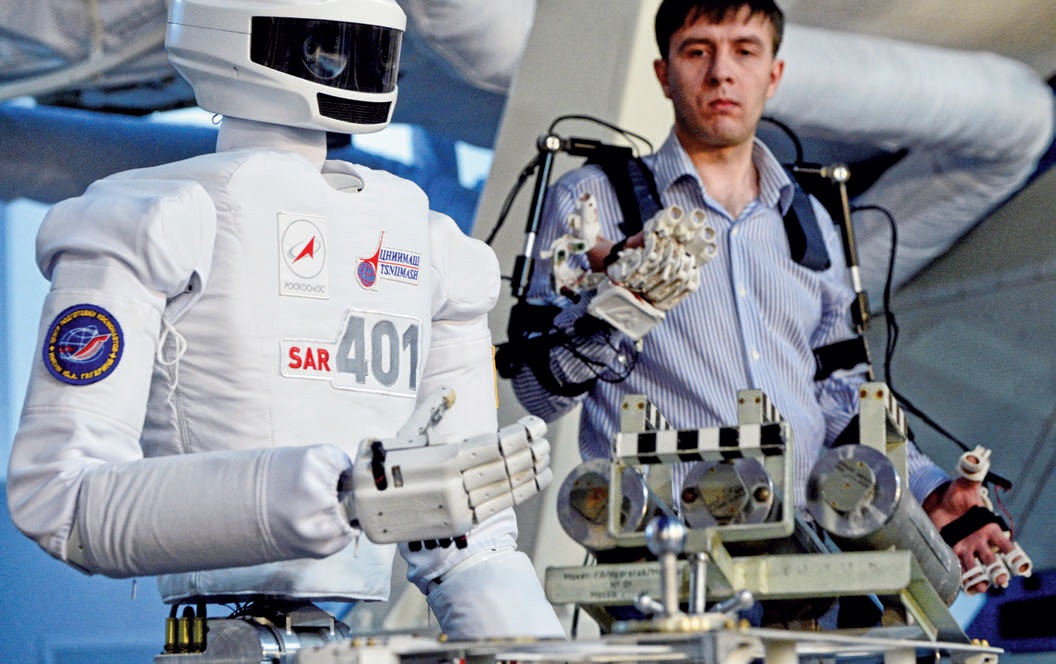
俄羅斯SAR-401機器人將在國際太空站上工作。(圖片來源:Getty)
除了走路之外,前述做法也可望改善機器人的靈活度,這也同樣重要。畢竟腳能幫你的有限,機器人還得有手臂與手掌才能幫上忙。工業機器人問市數十年至今,已讓我們累積許多經驗,知道如何使用機器手臂控制與操縱物體。現在甚至有非常逼真的五指機器手,例如SAR-401身上裝的那種。SAR-401是俄羅斯研發的遠端臨場機器人,2014年將登上國際太空站,協助上頭的太空人執行危險的太空任務。
SAR-401能夠在地球重力下舉起十公斤,既強壯又靈巧,可以用特製手套來遙控。無論戴手套的人做什麼動作,SAR-401的手都會跟著做。不過它們靈巧歸靈巧,可惜機器手沒裝感應器,因此太空人感覺不到機器手指的感覺。
雷伯特說,這表示永遠有改進空間,就連走路也是。「我們需要更好的電源系統,更好的致動器和更好的控制系統。一切必須合作無間才能做出走夠遠、帶夠重東西、並在複雜環境中工作的機器人。(待續)
(圖片來源:Lockheed Martin)
(本文由教育部補助「AI報報─AI科普推廣計畫」取得網路轉載授權)