
機器人的群體智慧

撰文/Emmet Cole│譯者/王怡文
轉載自《BBC知識》2015年5月第45期
在自然界中,團結就是力量。想想白蟻王國所蓋的高聳土墩,數千隻螞蟻打造的複雜蟻丘,或是小小磷蝦為了在遇到大型掠食者時增加存活率而組成的龐大蝦群。在這些例子中,單一個體無法完成任務(甚至求生),但是成千上百隻同類合作、各司其職(無論這些職掌有多微不足道),就產生了新力量。
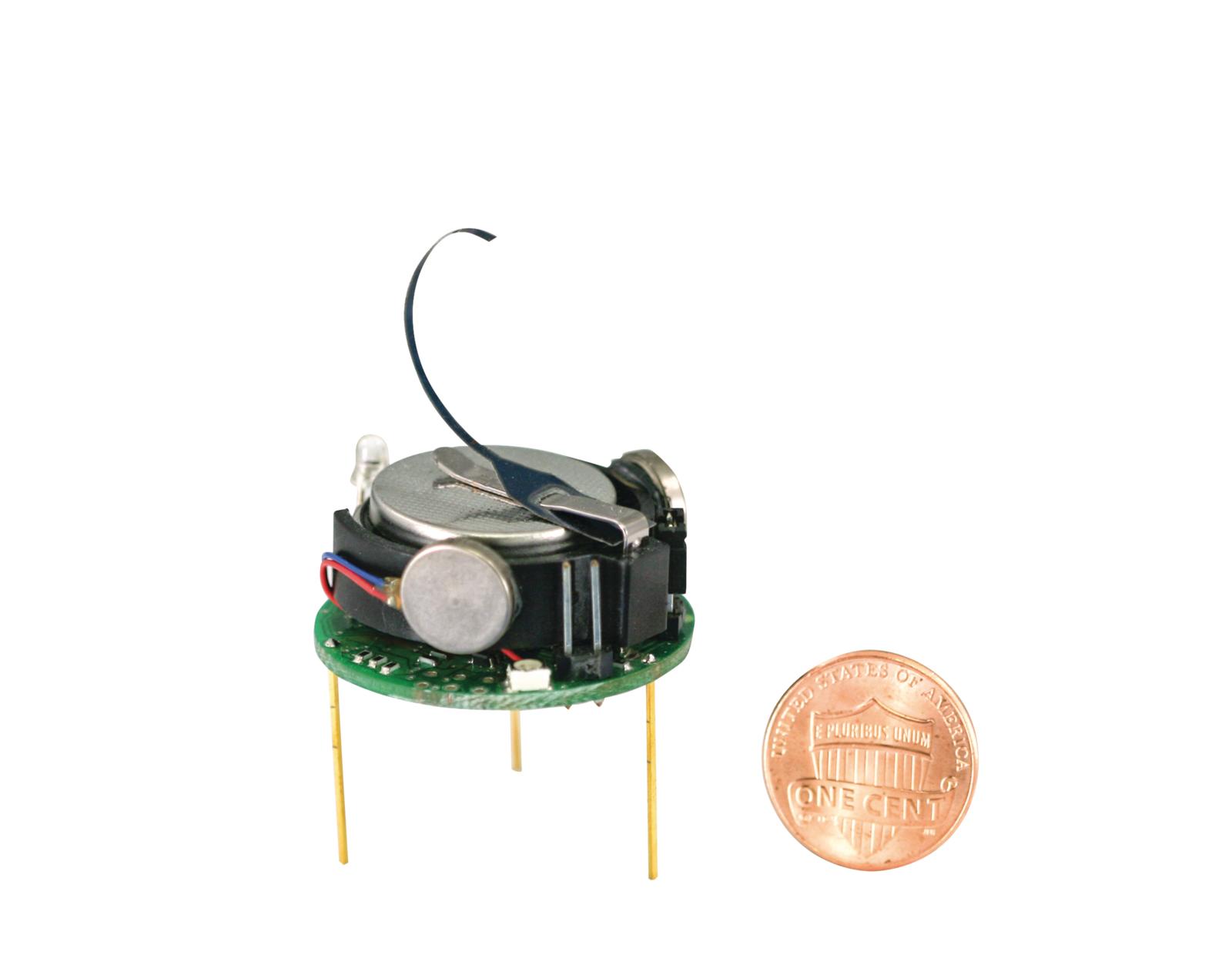
微型機器人Kilobot與美金一分硬幣的相對大小。(圖片來源:Michael Rubenstein)
長久以來,大自然的設計帶給機器人學家許多啟發,為我們創造出各式各樣的機器人,例如長得像人的人形機器人、以及具有昆蟲飛行技能的無人機。但是機器人能組成群體、有效合作,就像自然界的許多生物一樣嗎?
美國哈佛大學工程與應用科學學院(SEAS)的研究團隊顯然認為可以。他們成功讓一群會自行組織的機器人聽從指令排出各式圖形,2014年8月在《科學》期刊發表論文。這支大軍有1,024隻簡單的機器人「Kilobot」,每隻造價大約20美元。跟當今先進的機器人相比,Kilobot毫不起眼,它直徑只有三公分,靠三隻細長的腳移動,動力來源就是手機來電振動用的那種簡單馬達。
(圖片來源:Michael Rubenstein)
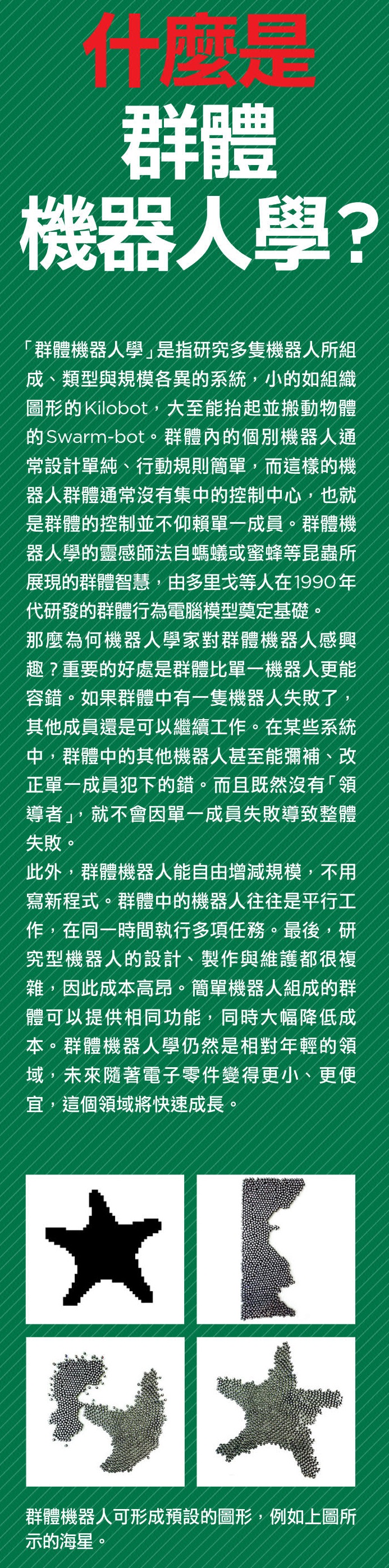
Kilobot的規格可能不突出,卻正好符合群體機器人研究的需要,能用來探討簡易機器人如何合力執行那些獨立無法完成的複雜任務。為了讓群體機器人排成圖形,科學家先將目標圖形的平面影像上傳給每隻機器人,並安排幾隻特別的「種子機器人」標出圖形的位置與方向,全程保持固定不動。只要上方懸掛的紅外線向聚在一起的大軍發出單一指令「出發!」,每隻機器人就利用周遭其他機器人提供的資訊,算出它距離種子機器人大約多遠;距離最遠的會開始沿群體邊緣移動。機器人一旦遇到種子機器人,就能算出自己的精確位置,用迷你紅外線感應器將這項資訊傳達給方圓半徑10公分內的機器人。機器人只要發現自己已位於目標圖形內,並且到達邊界或碰到停止移動的機器人,就會停止移動。遵循這些簡單規則,機器人就能組織出目標圖形。此外,如果其中一隻機器人犯了錯,研究團隊設計的演算法可讓群體內的其他成員去修正錯誤。
這組群體的動作一點也不快,組成圖形得花6到12小時不等,但它們是這類研究中成員最多的群體,而未來的設計肯定會更快。螞蟻王國不是一天造成的。這篇《科學》論文的第一作者,哈佛大學博士後研究員Mike Rubenstein表示,Kilobot研究人員的最大挑戰是做出夠便宜、能生產上千隻,表現的行為又夠有價值的機器人。「這些要求是互相衝突的:機器人既要便宜、簡單,組成的群體又要能完成有趣任務不搞混。」
世界頂尖的群體機器人學家Marco Dorigo說,Kilobot是很棒的研究工具。Dorigo是比利時布魯塞爾自由大學的人工智慧實驗室IRIDIA共同主持人,並未參與Kilobot計畫。「我們實驗室有120隻Kilobot用來做研究。它們既簡單又便宜,因此預算有限的研究團隊也能採用。而且它們很小,這代表你不需要太大的實驗空間。推出這款機器人是很好的主意。」
Dorigo說,群體機器人很適合危險任務,以及必須在廣大區域散布機器人的任務。「當任務對機器人有危險時,你會很高興系統能夠容錯。幾隻機器人壞了,系統的效能會降低一些,但還是能運作。如果任務需要同時在很多地方進行,群體機器人就比單一機器人更好用。」
Dorigo表示,群體機器人的可能應用包括搜救任務及圍堵汙染。另一種可能應用是建設居住地(例如在火星上)。但是Dorigo認為,現在討論群體機器人的未來用途還言之過早,「預測非常困難,因為目前離真實世界應用還很遙遠。這主要是受限於單一機器人的能力,而不是群體的限制。個別機器人還太脆弱,做不了太多事。」
機器人自行排出字母K及海星圖形的過程。近看行動中的個別機器人。它們動作很慢,形成海星圖形得花將近12小時。(圖片來源:Michael Rubenstein)
合作會更好
但是機器人組成群體的智慧會勝過個別的總合嗎?如果以整體功能來衡量智慧,那答案是肯定的:群體能執行的任務類型比單一機器人多。但是Dorigo解釋說,群體不會冒出無法以個別成員能力來解釋的神奇智慧。群體意料外的行為,往往是機械或程式錯誤的結果,以及研究人員考慮不周所致,而非群體的神祕特質。不過Rubenstein認為,未來機器人組成群體的智慧可能會超越個別的總和。「這是目標。我們開始能夠朝這樣的目標前進,希望它們不只能變得更有智慧,或許還能具備群體獨到的視野,看見個體看不見的事。」他感興趣的長遠目標,是用小小機器人組成群體來建構物體。這會是群體機器人學與「可程式化物質」(可依程式指令改變物理特性的物質)的合作成果。
Rubenstein說,「這項概念的目標是用數千隻小小機器人組成工具或其他機器人。你可以用許多小機器人,組合出更能適應環境、或更快修正錯誤的工具。」他和同事現在打算設計出更可靠、更快組成圖形的演算法。接下來,他們想研究如何在沒有任何人類指令的情況下,讓群體機器人自行依手邊任務算出最佳圖形並組織出來。Rubenstein說,「我們在《科學》期刊發表的是首次運用在上千隻機器人身上的演算法。但願這不會是最後一組成功運作的演算法。」
其他的群體機器人

(圖片來源:Eliza Grinnel /Harvard School of Engineering and Applied Sciences)
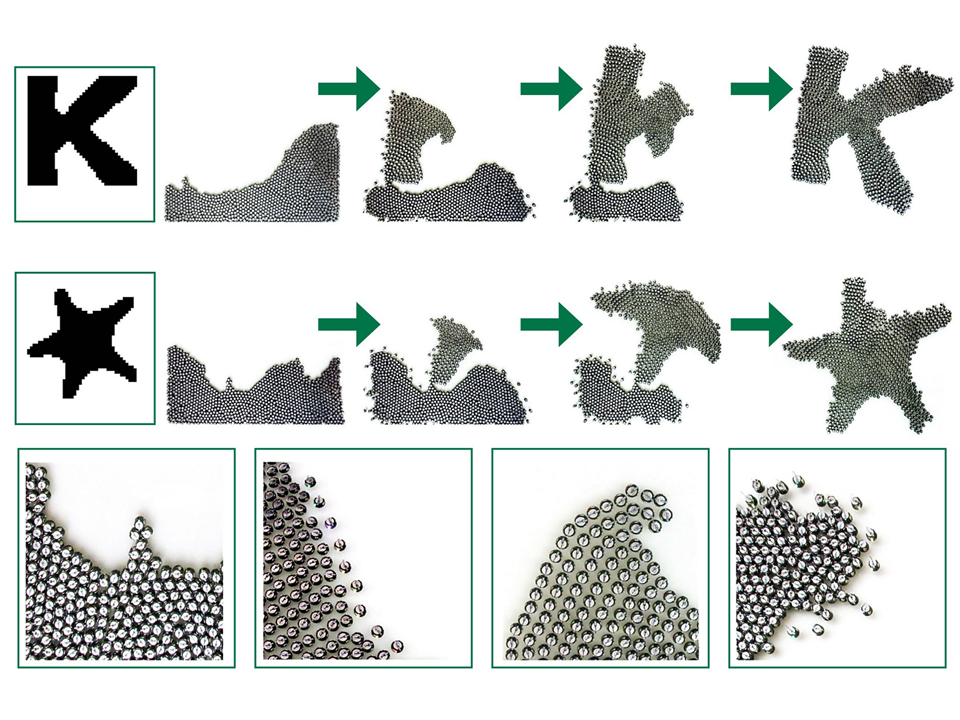
(圖片來源:M. Scott Brauer)
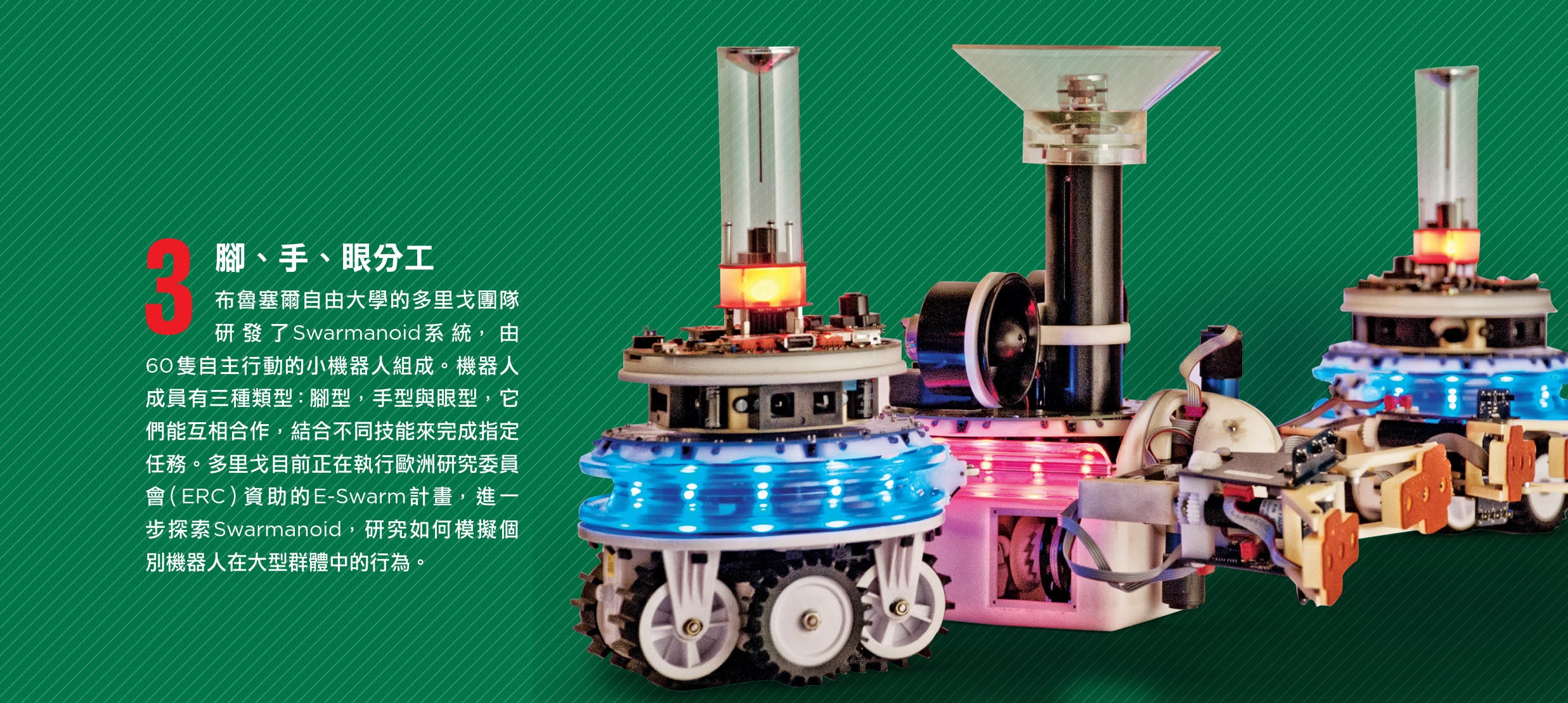
(圖片來源:Marco Dorigo/Iridia/Université libre de Bruxelles)
延伸閱讀:善用工具的模組機器人
(本文由教育部補助「AI報報─AI科普推廣計畫」取得網路轉載授權)