
重現滅絕物種的步伐
撰文/Darren Naish│譯者/陸維濃
轉載自《BBC知識》2019年6月第94期
大約四億年前,四足動物(tetrapod)這種陸生脊椎動物自水生魚類演化而來。早期的陸生四足動物走起路來遲緩笨拙,而且身體緊貼地面,移動時似乎沒有靈活度或速度可言,好比在格陵蘭東部3.6億年的岩層中被人發現化石而聲名大噪的魚螈(Ichthyostega )。所有化石分析的結果都指出,四足動物的步態(gait)非常沒有效率,然而陸生四足動物在稍晚的地球史中,展現驚人的多樣性,有些動物至今仍活躍於地球,顯然牠們最終演化出更好的靈活度、速度和移動效率。
據推測,當爬蟲動物和哺乳動物的祖先羊膜動物(amniote)等較為現代的四足動物開始演化後,事情才有了變化。這些新出現的動物逐漸演化出可節省體能的姿勢,以及讓身體不再貼地的能力。不過,所謂「先進的四足動物」,其步態的關鍵要素又是何時出現?哪些重要事件讓四足動物獲得既能讓身體離開地面、又能急奔的有效移動方式?
(圖片來源:Shutterstock;插圖:James Round)
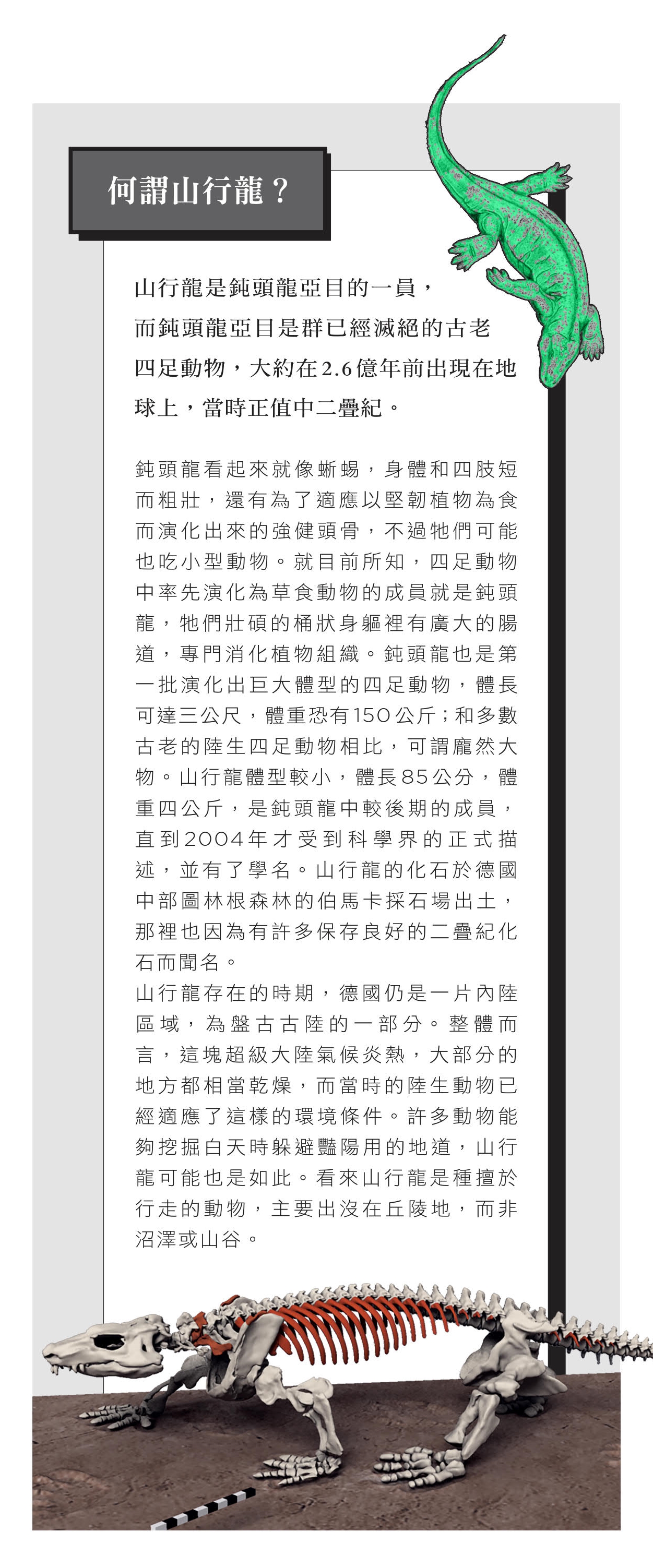
為了回答以上問題,以柏林洪堡大學John Nyakatura為首的研究團隊,轉而利用精密的電腦模擬和機器人學,聚焦於山行龍(Orobates)這種早期四足動物。2.6億年前,山行龍出沒在現今為德國的區域,一般認為牠們和羊膜動物的祖先有緊密的親緣關係,這樣的演化地位蘊藏重要意涵,表示山行龍有可能就是羊膜動物的祖先。換句話說,如果我們能進一步瞭解山行龍的生物學和行為,或許就能更全面認識羊膜動物。
不過,為什麼特別鎖定山行龍為研究目標,而不是鈍頭龍亞目(diadectid,包含山行龍在內的四足動物)或其他四足動物?
首先,山行龍有保存狀況極佳的完整遺骸,足以使科學家精準重建骨骼架構,藉此推斷山行龍的姿態和移動方式。其次,2007年在發現山行龍遺骸的區域,又發現一組化石足印,其地質年代和山行龍存在的時間相符,留下足印的動物體型和外形也與山形龍吻合,幾乎可說就是山形龍的足印。這在古生物學的研究領域中相當罕見,重要性不言而喻,表示我們握有直接的化石紀錄,可以研究這種動物步行時如何放置四肢。
再者,四足動物的譜系中,山行龍是特別有趣的部分。Nyakatura說,「就山行龍在譜系中的位置而言,這化石可謂非常關鍵,因為所在位置非常靠近羊膜動物的起源,而羊膜動物主要由一群離水生活的動物所組成。」
模擬步伐
山行龍和現今的兩棲動物不太相似,既不是爬蟲動物,也不是哺乳動物的親戚。來自英國赫特福郡皇家獸醫學院、亦為團隊成員的John Hutchinson解釋,「山行龍體型中等,身長大約85公分,若以較不嚴謹的標準來看,牠集合了類兩棲動物和類爬蟲動物的特徵,是種有點像蠑螈,也有點像蜥蜴的動物。」
Nyakatura和同事因此展開一項抱負宏大的計畫。立基於過往以蠑螈、鱷魚和其他四足動物移動方式為主題的研究,再將從山行龍遺骸中得到的資料結合化石足印,試圖利用電腦模擬和機器人學來分析山行龍的步態和姿態,也就是針對化石足印打造數位和實體架構,顯現山行龍的步伐。不過,究竟如何得到精準的山形龍步態?研究團隊嘗試以反向工程的方式模擬各種可能。
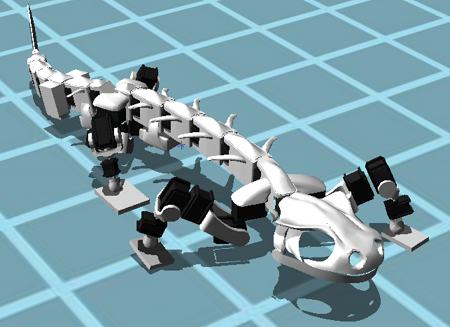
為了這項研究而建置的機器動物或許是最有趣的部分,同時備受媒體關注。稱為「OroBOT」的機器動物,肢體具有一定程度的移動範圍,軀體的設計仿照山行龍的真實模樣,和真正的動物一樣擁有許多可動關節,以及柔軟易曲的腳掌,使它踏出的每一步都能和地面有適當接觸,其質量分布的模式和活體山行龍相符,展現步態和姿勢時,能呈現多種細微的變化。
OroBOT的逼真程度令人驚豔,移動性和靈活度足具真實感,就像大型蜥蜴或小型鱷魚。「看著它第一次走動,對我們而言是不可思議的時刻。」Nyakatura說,「馬達確認正常後,OroBOT從類似伏地挺身的動作起身,踏出第一步。我八成會永遠記得那一刻,大家都樂在其中。」
研究團隊利用從動物活體蒐集而來的數據,說明步行方式和肢體姿態的效率程度。藉由四種動物(蠑螈、石龍子、鬣蜥和凱門鱷)的資料,決定OroBOT如何呈現就生物學的觀點而言,最接近真實狀況的姿態和姿勢。研究人員還測量了OroBOT的質量中心以及身體各部位的重量分布方式。團隊共模擬了512種步態,根據我們對真實動物的瞭解來判斷各個步態表現的良好程度並評分。
Nyakatura說,「我們探究了許多種可能步態,依據解剖學上的合理性和其他因素加以評估,最後在機器動物上測試。」有些步態造成OroBOT失去平衡,移動時肢體互撞或是對關節造成過多壓力,較不可能出現在動物身上。此外,活體動物移動關節時,傾向使用相對而言耗能極低的步態,因此沒有效率可言的步態也不會被採納。
獲得最高分的OroBOT步態說來驚人:行走時四肢高立且外擴(不過相對而言已稱得上靠近身體),身體則遠離地面。這樣的步態和鬣蜥、凱門鱷較為相似,不太像蠑螈或石龍子等四肢短的蜥蜴,表示山行龍以一種有效率且「現代化」的方式行走(其他鈍頭龍亞目的成員可能也是如此),令人聯想到鱷魚等較現代的爬蟲類動物,而非先前假設山行龍以移動效率較差、看起來較笨拙的步態行走。

(圖片來源:Dr. John Nyakatura/Humboldt University in Berlin)
昂首闊步
這些現象也指出,四足動物在其演化史的相對早期、羊膜動物出現之前,就已經演化出精密且複雜的陸上移動方式。鈍頭龍亞目成員的行走方式並不像羊膜動物的原型那樣笨拙(推測其他和鈍頭龍有親緣關係的四足動物也是如此),從步態、姿態和移動效率看來,牠們在陸上早已具備一定的移動能力。
利用多種技術並結合多項證據,檢驗早已滅絕的動物之步態,並提出多種可能,呈現出更令人滿意、更實際的結果,正是這項研究的美妙之處。這些發現令人注目的程度足以說明,這是種可靠且有用的技術,最終研究團隊藉由生物機器人輔助的反向工程,展示有趣且重要的早期四足動物究竟如何移動。
「我們提供了許多可能,以及一些有力的工具和資料集,讓其他人能夠重現並以視覺化的方式呈現我們的結果。」Hutchinson說,「我們希望展現結合各領域證據,從足印、骨骼、數位動畫、活體動物實驗、機器人到電腦模擬,說穿了就是一籮筐的技術,可以解答未來其他相似生物的疑問。」
這項技術和OroBOT的成功,說明同樣的研究方式未來可以應用於其他古老動物,例如在演化史上有重要地位的動物,或是迥異於其他現存生命而顯得不尋常且神祕的物種。Hutchinson說,「我樂見有人以這樣的方式研究三疊紀的翼龍如何行走。」

(圖表:James Round)
(本文由教育部補助「AI報報─AI科普推廣計畫」取得網路轉載授權)