
人模人樣的機器人(2/2)
撰文/Duncan Graham-Rowe│譯者/王怡文
轉載自《BBC知識》2014年6月第34期
機器人如何思考
智慧型機器人將必須跟上人腦的能力與效率。
把機器人做得像人的一大動機,或許是希望它們變得更聰明。畢竟,如果想做出智慧型機器人,那麼借鏡我們所知最精巧的電腦「人腦」,就不無道理。
能夠計算圓周率到小數點後十億位是不錯,但若要同時處理一大堆資訊,就難倒傳統電腦了。或許最明顯的是模式辨識任務,例如即使經過多年、外貌有所改變,我們還是認得出同一張臉。
數位大腦
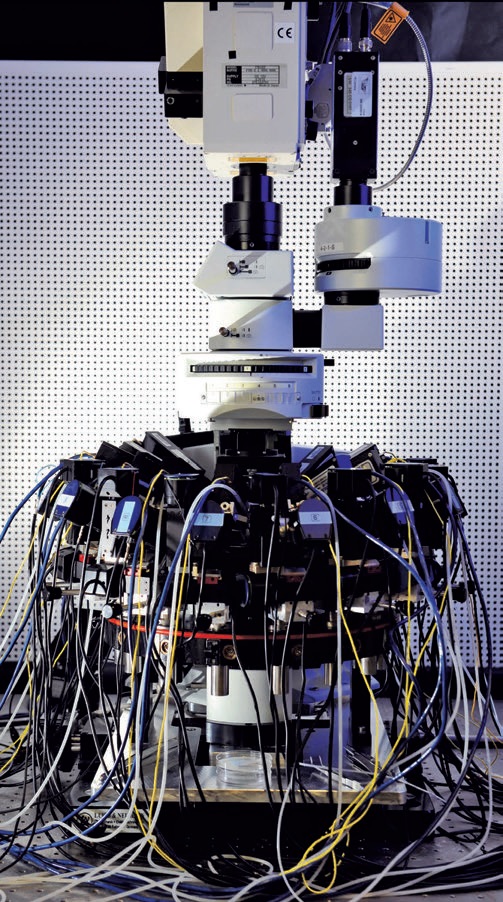
這套「膜片鉗」設備能同時記錄12個神經元的活動,而做一個機器腦得模擬860億個神經元──這是人腦計畫努力追求的目標。(圖片來源:Human Brain Project)
瑞士洛桑聯邦理工學院神經科學暨科技中心主任Henry Markram已提出一個解答。馬克拉姆領導「人腦計畫」(Human Brain Project),這個大膽的任務是用超級電腦模擬完整人腦的精確架構、功能與連結,包括全部八百六十億個神經元,以及它們彼此間的一百兆個連結。今日最有威力的超級電腦能夠執行每秒千兆次浮點運算等級的運算處理。馬克拉姆表示,「人腦計畫」得耗費比這強一千倍的電腦,以及足以供應像布萊頓(Brighton)這樣一座小城市所需的電力。這對機器腦來說不太可行。
像人類的腦袋
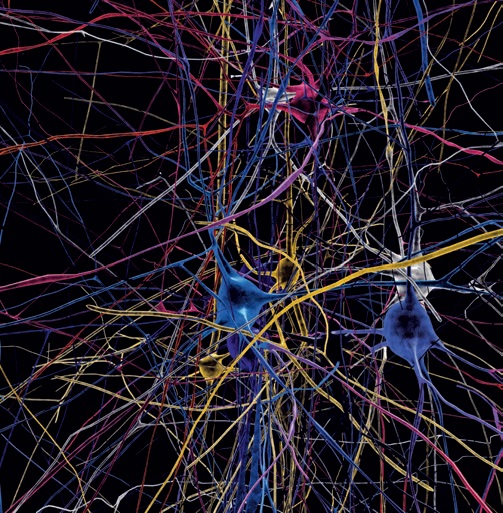
人腦計畫模擬的神經網絡。(圖片來源:Human Brain Project)
然而還有其他做法。美國史丹佛大學生物工程師Kwabena Boahen所研發的神經網格(NeuroGrid),是內含一百萬個神經元的「仿神經」電腦,它也是運用仿神經的做法在電腦模擬大腦活動,但卻是利用電路中電晶體及其他元件的類比(而非數位)特性及性質,因此只需少量電力就能模擬一百萬個神經元、以及連接它們彼此的六十億個突觸,就像生物大腦。「這個做法的主要動機是,大腦所做的事遠不只是運算。」波爾漢說,「大腦的一大魅力就是它所消耗的能量非常少。是什麼使它們如此有用又有效率?這還是謎。」
但是最引人入勝的是智慧的議題。仿神經法不只表示我們可能創造出聰明得近似人腦的機器人,還帶來一個希望:我們可以擴大建構出比人腦更複雜、而且或許(只是或許)更有智慧的東西。
機器人如何互動
機器人學的最後階段,是使機器人天衣無縫地融入人類社會。
面對現實吧,你做的機器人有多聰明、多靈活甚至多可愛都不重要;如果它們不易使用,人們很快就會失去興趣。避免這情況最好的辦法,就是別想要使用者寫程式或讀說明書,而是把它們設計成憑直覺就能與人互動,彷彿它們也是人。這是機器人學家面臨的重大關卡。人類的溝通非常複雜而巧妙,充滿著無數微妙、非語言的手勢、指示和表情,這些全都富含意義。
對此大概沒有人比石黑浩更清楚了。他是日本大阪大學機器人學家,以創造真人的機器分身聞名,它們逼真得與本尊難辨真偽。「我的研究不只是研發機器人,也是為了破解人類自身天性。這是因為,使我們人類與眾不同的許多性質,仍然不是很清楚。因此無論人形機器人距離實用價值有多遠,我們仍然投入大量資金進行研發。」
極簡版人類

如果你真的想要和電話另一端的人交流,何不隨身攜帶這個看不出是男是女的電傳機器人?(圖片來源:Getty)
然而,石黑稱為擬真機器人(Geminoid)的這些產物,儘管逼真、細緻得令人印象深刻,卻可能沒必要、甚至不妥。石黑的最新研究,已從「追求擬真」這極端轉往另一個極端:創造只有最基本人類特徵的機器人,其他特徵則仰賴我們自行想像。「我現在在研究電傳機器人(Telenoid),它們的外形及行為像極簡版的人類。電傳機器人一看就知道是人形,但它的樣子既像男的又像女的,既老又年輕。」石黑說。
乍看之下電傳機器人就像個蒼白、被砍下來的頭與軀幹,帶著手臂殘肢,以及簡化到只剩眼睛、鼻子、嘴,幾乎像鬼的人臉。這些機器人是設計來當作遠端臨場通訊的工具,內建馬達可形成一些簡單表情,讓人們透過機器人和遠方的某人交談及互動。
石黑相信,即使它只有簡單設計及有限表情,人們仍能輕易認出跟他們交談的電傳機器人是男是女、是老或少。也就是說,電傳機器人就像白板,讓人們可以在腦中自行補上細節。石黑表示,丹麥目前正在進行一項實驗,讓老年人試試這種新形態通訊媒介表現如何。
跟機器人搏感情
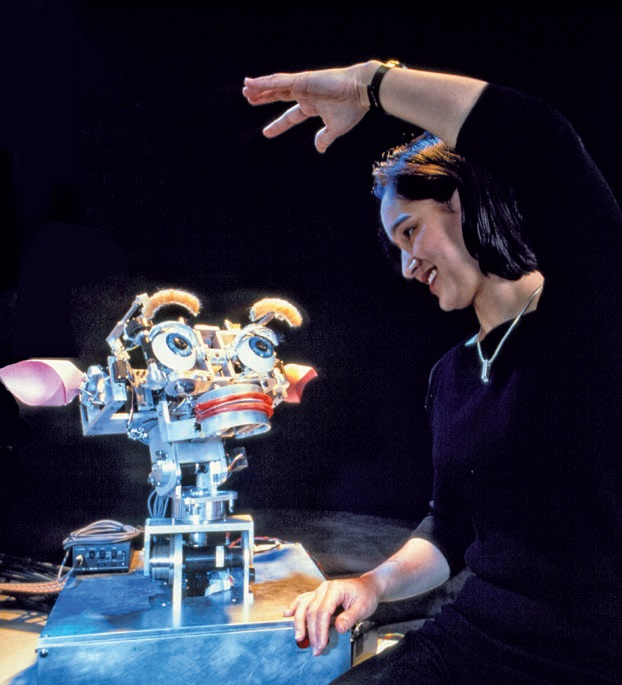
Breazeal和她創造的Kismet互動,它以表情回應她的舉止。(圖片來源:Science Photo Library)
類似做法在十多年前也有個成功例子,那就是樣子像小精靈的機器腦袋Kismet。它利用誇張的、嬰兒般的表情,以情感強迫人們與它產生社會互動,例如人家不跟它玩,就一副傷心樣;或者一直對它反覆做同樣的事,它就露出無聊的表情。Kismet是麻省理工學院Cynthia Breazeal的心血結晶,它不只證實我們抗拒不了可愛的臉,也讓我們知道,我們天生對嬰兒需求的回應,或可利用來教導機器人。
現在Kismet已發展成更漂亮、比較不像動物、活動更靈活的機器人Nexi,它也有手臂,能與環境互動。這種組合可讓Nexi接受訓練,執行不同的複雜社會任務,例如共享注意力(joint attention),亦即在兩人以上的場合,當事人藉由手勢或視線向他人指出自己注意的東西。
這種技能是人類互動的基石,舉例來說,它應該有助於確保機器人不會像某些狗一樣,在我們用手指著東西時,只會盯著我們的指尖。這就像讓機器人上禮儀學校,教導它們社交禮節以幫助它們適應這個世界,讓它們更像我們一點。(完)
(本文由教育部補助「AI報報─AI科普推廣計畫」取得網路轉載授權)